IV. Regressão não paramétrica
Última atualização: 26 de janeiro de 2019.
Correlação e regressão estão intimamente relacionadas. Na correlação estamos principalmente
preocupados com os aspectos qualitativos das relações possíveis. A regressão preocupa-se com os aspectos
quantitativos das relações, tais como determinar a inclinação e intercepto de uma linha reta que fornece um
ajuste adequado para dados fornecidos. Caso o ajuste considerado adequado seja um polinômio de grau \(p\) é necessário
fornecer valores para as \(p + 1\) constantes que determinam um polinômio de melhor ajuste. Há sim equivalência entre
alguns aspectos das duas abordagens, por exemplo, em regressão linear um teste de inclinação zero é equivalente
a um teste de correlação zero. Valores de \(+1\) ou \(-1\) para o coeficiente de correlação do produto de momentos
da Pearson nos diz que todos os pontos observados estão em uma linha reta.
Estudaremos aqui a regressão não paramétrica e para isso vamos considerar \(n\) pares de observaçães
\((x_1,Y_1),\cdots,(x_n,Y_n)\) como nas figuras abaixo. A variável aleatória resposta \(Y\) está relacionada à
covariável determinística \(x\) pelas equações
\begin{equation}
Y_i \, = \, r(x_i)+\epsilon_i, \qquad \mbox{E}(\epsilon_i) \, = 0, \qquad i=1,2,\cdots,n,
\end{equation}
onde \(r\) é a função de regressão. A variável \(x\) também é chamada de recurso. Queremos estimar
ou “aprender” a função \(r\) em hipóteses fracas. O estimador de \(r(x)\) é denotado por \(\widehat{r}_n(x)\).
Também nos referimos a \(\widehat{r}_n(x)\) como um suavizador. A princípio, faremos a suposição simplificadora
de que a variância \(\mbox{Var}(\epsilon_i) = \sigma^2\), ou seja, a variância de \(\epsilon_i\) não depende de \(x\).
Vamos relaxar essa suposição mais tarde.
Na equação acima, estamos tratando os valores da covariável \(x_i\) como fixos. Poderíamos tratá-los como
aleatórios, em cujo caso escrevemos os dados como \((X_1,Y_1),\cdots,(X_n,Y_n)\) e \(r(x)\) é então interpretado como
a média de \(Y\) condicional em \(X = x\), isto é,
\begin{equation}
r(x) \, = \, \mbox{E}(Y \,| \, X=x)\cdot
\end{equation}
Há pouca diferença nas duas abordagens e, na maioria das vezes, adotamos a abordagem “fixo \(x\)”, exceto quando indicado.
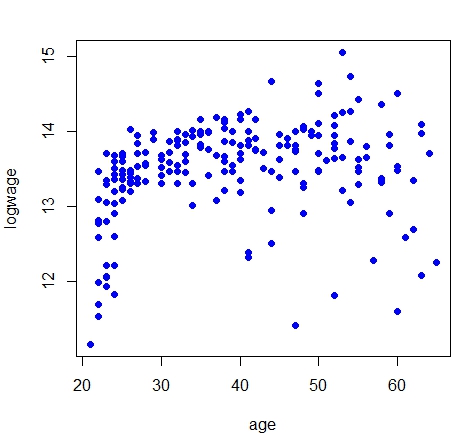
Exemplo IV.1. Começamos com um conjunto de dados clássico retirado do livro de Pagan & Ullah (1999) que considera
dados salariais canadenses de corte transversal consistindo de uma amostra aleatória retirada das Cópias de Uso Público
do Censo Canadense de 1971 para indivíduos do sexo masculino com educação em comum (Grau 13). Existem \(n = 205\)
observações no total e 2 variáveis: o logaritmo do salário do indivíduo (logwage) e sua idade (age). A
equação salarial tradicional é tipicamente modelada como uma idade quadrática. Os dados estão disponíveis
no arquivo de dados
cps71, no pacote de funções
np. Este será um dos pacotes de funções
R que utilizaremos para mostrar o ajuste dos modelos de regressão não paramétricos.
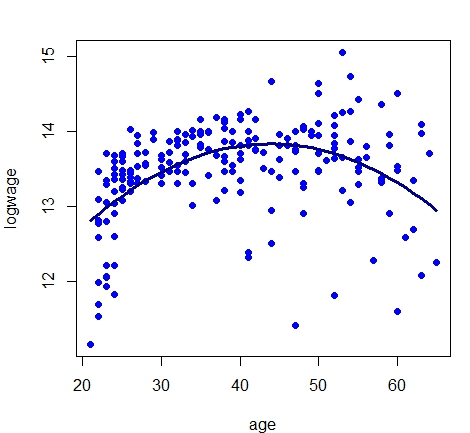
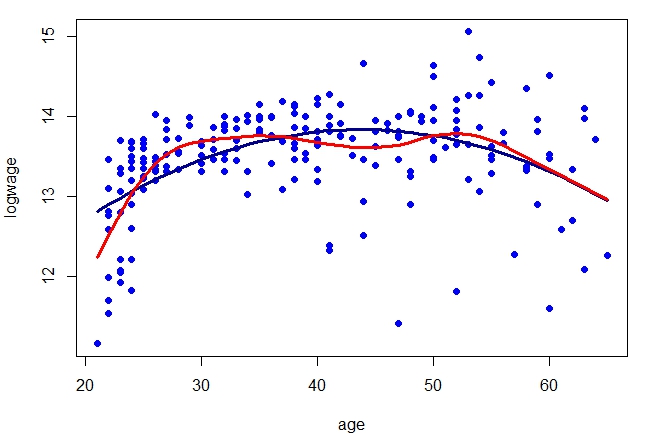
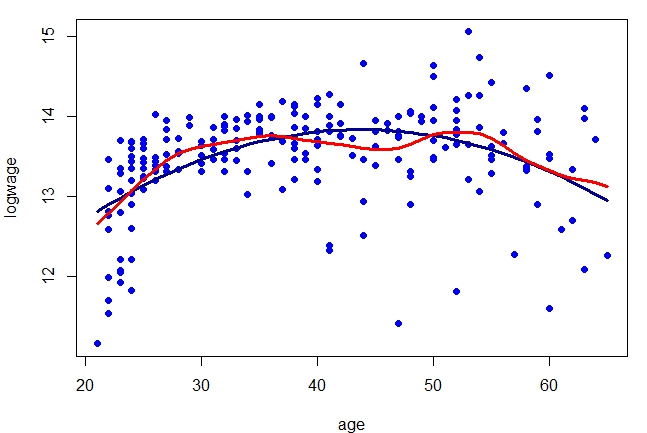
Estas figuras mostram a descrição dos dados a esquerda e o modelo de regressão paramétrico estimado a direita. Estas
figuras foram obtidas com as linhas de comando mostradas a seguir.
> library(np)
> data("cps71")
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> model.par = lm(logwage ~ age + I(age^2), data = cps71)
> summary(model.par)
Call:
lm(formula = logwage ~ age + I(age^2), data = cps71)
Residuals:
Min 1Q Median 3Q Max
-2.4041 -0.1711 0.0884 0.3182 1.3940
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 10.0419773 0.4559986 22.022 < 2e-16 ***
age 0.1731310 0.0238317 7.265 7.96e-12 ***
I(age^2) -0.0019771 0.0002898 -6.822 1.02e-10 ***
---
Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Residual standard error: 0.5608 on 202 degrees of freedom
Multiple R-squared: 0.2308, Adjusted R-squared: 0.2232
F-statistic: 30.3 on 2 and 202 DF, p-value: 3.103e-12
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
Nós temos medições ruidosas de \(Y_i\) e \(r(x_i)=10.0419+0.1731age-0.0019age^2\). Nosso objetivo é estimar
\(r\) de forma não paramétrica. A variância \(\mbox{Var}(\epsilon_i)\) definitivamente não é constante
como uma função de \(x\).
Os métodos que consideramos aqui são os métodos de regressão local e métodos de penalização.
O primeiro inclui a regressão do kernel e a regressão polinomial local. Este último leva a métodos baseados em
splines. Todos os estimadores considerados são suavizadores lineares.
Antes de mergulharmos na regressão não-paramétrica, primeiro revisamos brevemente a regressão linear ordinária
e sua regressão logística relativa próxima.
Suponhamos temosos dados \((x_1,Y_1),\cdots,(x_n,Y_n)\) onde \(Y_i\in\mathbb{R}\) e \(x_i=(x_{i1},\cdots,x_{ip})^\top\in\mathbb{R}^p\).
O modelo de regressão linear assume que
\begin{equation}
Y_i \, = \, r(x_i) \, + \, \epsilon_i \, = \, \sum_{k=1}^p \beta_kx_{ik} \, + \, \epsilon_i, \qquad i=1,\cdots,n,
\end{equation}
onde \(\mbox{E}(\epsilon_i)=0\) e \(\mbox{Var}(\epsilon_i)=\sigma^2\). Normalmente, queremos incluir um intercepto no modelo, então
vamos adotar a convenção de que \(x_{i1} = 1\).
A matriz de planejamento \(X\) é uma matriz de dimensão \(n\times p\) definida por
\begin{equation}
X \, = \, \begin{pmatrix} x_{11} & x_{12} & \cdots & x_{1p} \\ x_{21} & x_{22} & \cdots & x_{2p} \\
\vdots & \vdots & \vdots & \vdots \\ x_{n1} & x_{n2} & \cdots & x_{np} \end{pmatrix}\cdot
\end{equation}
O conjunto \(\mathcal{L}\) de vetores que podem ser obtidos como combinações lineares das colunas de \(X\), é chamado
de espaço de coluna de \(X\).
Seja \(Y_i=(Y_1,\cdots,Y_n)^\top\), \(\epsilon=(\epsilon_1,\cdots,\epsilon_n)^\top\) e \(\beta=(\beta_1,\cdots,\beta_p)^\top\). Podemos então
escrever o modelo de regressão linear como
\begin{equation}
Y \, = \, X\beta \, + \, \epsilon\cdot
\end{equation}
Os estimadores de mínimos quadrados \(\widehat{\beta}=(\widehat{\beta}_1,\cdots,\widehat{\beta}_p)^\top\) é o vetor que
minimiza a soma de quadrados dos resíduos
\begin{equation}
(Y-X\beta)^\top (Y-X\beta) \, = \, \sum_{i=1}^n \left( Y_i - \sum_{k=1}^p x_{ik}\beta_k\right)^2\cdot
\end{equation}
Assumindo que \(X^\top X\) seja inversível, o estimador de mínimos quadrados é
\begin{equation}
\widehat{\beta} \, = \, (X^\top X)^{-1}X^\top Y\cdot
\end{equation}
O comando lm avalia esta expresão e, é desta forma que obtemos \(\widehat{\beta}_0=10.0419773\),
\(\widehat{\beta}_1=0.1731310\) e \(\widehat{\beta}_2=-0.0019771\) com os dados do exemplo acima.
O estimador de \(r(x)\) no ponto \(x=(x_1,\cdots,x_p)^\top\) é então
\begin{equation}
\widehat{r}_n(x) \, = \, \sum_{k=1}^n \widehat{\beta}_kx_k \, = \, x^\top \widehat{\beta}\cdot
\end{equation}
Avaliando esta equação obtemos a curva estimada do logaritmo da renda anual segunda a idade do declarante, isto realizado
com o auxílio do comando fitted.values aplicado no objeto model.par.
Segue-se que os valores ajustados \(\widehat{r}_n(x)=(\widehat{r}_n(x_1),\cdots,\widehat{r}_n(x_n))^\top\) podem ser escritos matricialmente
como
\begin{equation}
\widehat{r}_n(x) \, = \, X\widehat{\beta} \, = \, HY,
\end{equation}
onde
\begin{equation}
H \, = \, X(X^\top X)^{-1}X^\top
\end{equation}
é chamada de matriz hapéu. Os elementos do vetor \(\widehat{\epsilon} = Y − \widehat{r}_n(x)\) são chamados de
resíduos ordinários. A matriz chapéu é simétrica \(H = H^\top\) e idempotente, \(H^2 = H\). Segue-se
que \(\widehat{r}_n(x)\) é a projeção de \(Y\) no espaço de colunas \(\mathcal{L}\) de \(X\). Pode-se mostrar
que o número de parâmetros \(p\) está relacionado à matriz \(H\) pela equação
\begin{equation}
p \, = \, \mbox{tr}(H)
\end{equation}
onde \(\mbox{tr}(H)\) denota o traço da matriz \(H\), isto é a soma dos seus elementos na disgonal principal. Na regressão
não paramétrica, o número de parâmetros será substituído pelos graus de liberdade efetivos que serão
definidos através de uma equação como \(p \, = \, \mbox{tr}(H)\).
Dado qualquer \(x=(x_1,\cdots,x_p)^\top\), podemos escrever
\begin{equation}
\widehat{r}_n(x) \, = \, \mathcal{l}(x)^\top Y \, = \, \sum_{i=1}^n \mathcal{l}_i(x)Y_i,
\end{equation}
sendo que
\begin{equation}
\mathcal{l}(x)^\top \, = \, x^\top(X^\top X)^{-1}X^\top\cdot
\end{equation}
Um estimador não viciado de \(\sigma^2\) é
\begin{equation}
\widehat{\sigma}^2 \, = \, \dfrac{1}{n-p}\sum_{i=1}^n\big( Y_i-\widehat{r}_n(x_i)\big)^2 \, = \, \dfrac{||\widehat{\epsilon}||}{n-p}\cdot
\end{equation}
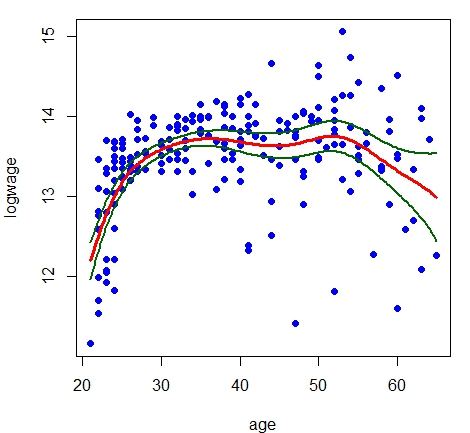
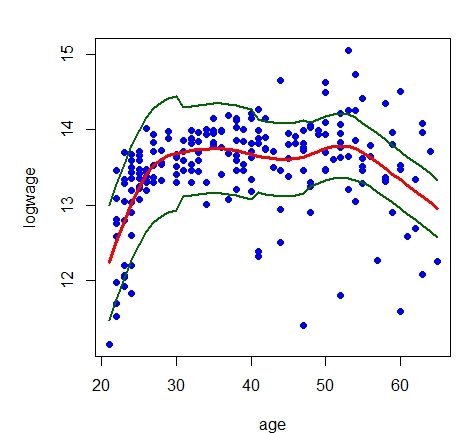
Em seguida, construímos uma banda de confiança para \(\widehat{r}_n(x)\). Queremos encontrar um par de funções
\(a(x)\) e \(b(x)\) tais que
\begin{equation}
P\Big( \big\{x\in\mathbb{R}^p \, : \, a(x)\leq \widehat{r}_n(x)\leq b(x), \, \forall \, x \big\}\Big) \geq 1-\alpha\cdot
\end{equation}
Dado que \(\widehat{r}_n(x) \, = \, \sum_{i=1}^n \mathcal{l}_i(x)Y_i\), segue que
\begin{equation}
\mbox{Var}\big(\widehat{r}_n(x) \big) \, = \, \sigma^2 \sum_{i=1}^n \mathcal{l}_i^2(x) \, = \, \sigma^2||\mathcal{l}||^2,
\end{equation}
o qual sugere utilizarmos bandas de confiança da forma
\begin{equation}
I(x) \, = \, \big( a(x),b(x) \big) \, = \, \Big( \widehat{r}_n(x)-c\widehat{\sigma}||\mathcal{l}(x)||,
\widehat{r}_n(x)+c\widehat{\sigma}||\mathcal{l}(x)||\Big),
\end{equation}
para alguma constante \(c\). O teorema a seguir pode ser encontrado em Scheffé (1959). Denotemos por \(F(p, n-p)\) a variável
aleatória com distribuição \(F-Fisher\) com graus de liberdade \(p\) e \(n-p\). Seja \(F_\alpha(p, n−p)\) o
\(\alpha\)-quantil superior para essa variável aleatória, ou seja, \(P\big(F(p,n-p)> F_\alpha(p,n-p)\big)= \alpha\).
Teorema IV.1.
Considere a amostra aleatória \((x_1,Y_1),\cdots,(x_n,Y_n)\) satisfazendo um modelo de regressaão linear. A banda de
confiança
\begin{equation}
\Big( \widehat{r}_n(x)-\sqrt{pF_\alpha(p,n-p)}\widehat{\sigma}||\mathcal{l}(x)||,
\widehat{r}_n(x)+\sqrt{pF_\alpha(p,n-p)}\widehat{\sigma}||\mathcal{l}(x)||\Big),
\end{equation}
satisfaz que
\begin{equation}
P\Big( \big\{x\in\mathbb{R}^p \, : \, \widehat{r}_n(x)-\sqrt{pF_\alpha(p,n-p)}\widehat{\sigma}||\mathcal{l}(x)||\leq \widehat{r}_n(x)
\leq \widehat{r}_n(x)+\sqrt{pF_\alpha(p,n-p)}\widehat{\sigma}||\mathcal{l}(x)||, \, \forall \, x \big\}\Big) \geq 1-\alpha\cdot
\end{equation}
Demonstração.
Ver Scheffé (1959).▉
Antes de passar para o procedimento anunciado aqui, olhamos brevemente para o modelo clássico de regressão de mínimos
quadrados. Muitos leitores já estarão familiarizados com este modelo, mas enfatizamos aqui os aspectos que ajudam a entender
a lógica por trás de muitas abordagens livres de distribuição. Na abordagem paramétrica clássica,
assume-se que para cada um dos \(n\) conjuntos de \(x_i\) observados, que podem ser variáveis aleatórias ou um conjunto de
valores fixos que podem ou não ser escolhidos antecipadamente, observamos algum valor \(y_i\) de uma variável aleatória
\(Y_i\), que tem as propriedades que sua média depende, ou seja, é condicionada ao valor de \(x_i\) de tal forma que
\begin{equation}
\mbox{E}(Y_i|x_i) \, = \, \beta_0 + \beta_1 x_i,
\end{equation}
enquanto a variância de \(Y_i\) é independente de \(x\) e para todos os \(x_i\) tem o valor
\begin{equation}
\mbox{Var}(Y_i) \, = \, \sigma^2,
\end{equation}
onde \(\beta_0\), \(\beta_1\) e \(\sigma^2\) são desconhecidos. A relação linear entre \(\mbox{E}(Y|x)\) e \(x\) da forma
\(\mbox{E}(Y|x) = \beta_0 + \beta_1x\) entre a média condicional de \(Y\) e \(x\) dado define a regressão de \(Y\) em \(x\). A
linha tem inclinação \(\beta_1\) e intercepto \(\beta_0\) no eixo \(y\). A notação \(Y_i|x_i\) é a notação
convencional para um evento ou variável \(Y_i\) tendo alguma propriedade condicionada a um \(x_i\) especificado.
Para muitos fins de inferência, assume-se também que a distribuição condicional de \(Y_i | x_i\) é \(N(\beta_0 + \beta_1x_i, \sigma^2)\).
Um problema clássico de regressão é estimar \(\beta_0\), \(\beta_1\) e, às vezes, também \(\sigma^2\) dado um conjunto
de \(n\) observações emparelhadas \((x_1, y_1), (x_2, y_2),\cdots ,(x_n, y_n)\) onde para um dado \(x_i\) o \(y_i\) é um valor
observado da variável aleatória \(Y_i\). Estas condições são válidas se cada um \((x_i, y_i)\) satisfizer
\begin{equation}
y_i \, = \, \beta_0 + \beta_1x_i + \epsilon_i,
\end{equation}
onde cada \(\epsilon_i\) é um valor não observado de uma variável aleatória \(N(0,\sigma^2)\) e os \(\epsilon_i\) são
independentes uns dos outros e também de \(x_i\). A estimativa de mínimos quadrados busca valores \(\widehat{\beta}_0\) e \(\widehat{\beta}_1\) que minimizem
\begin{equation}
S = \sum_{i=1}^n \big( y_i-\beta_0-\beta_ix_i\big)^2\cdot
\end{equation}
A linha reta \(y=\widehat{\beta}_0+\widehat{\beta}_1x\) é chamada de regressão de mínimos quadrados de \(y\) em \(x\). Se, para
qualquer linha \(y=\beta_0+\beta_1x\), denotamos a coordenada \(y\) correspondente a \(x=x_i\) por \(\widehat{y}_i\), ou seja, \(\widehat{y}_i=\widehat{\beta}_0+\widehat{\beta}_1x_i\)
então as diferenças entre os valores observados e previstos, isto é, \(\widehat{\epsilon}_i=y_i-\widehat{y}_i\), \(i=1,2,\cdots,n\)
são chamados os resíduos absolutos com relação a essa linha.
Com os pressupostos acima da regressão clássica por mínimos quadrados é feita uma generalização de testes
clássicos para comparação de médias de tratamento. Em particular, um teste de \(H_0: \, \beta_1=0\) equivale a um teste
de igualdade de um conjunto de médias. Isso decorre de considerarmos os \(x_i\) como indicadores ou rótulos anexados às amostras.
Se houver \(n\) observações emparelhadas \((x_i, y_i)\), cada \(y_i\) correspondente a um \(x_i\) particular pode ser encarado como um
valor observado a partir da amostra marcada por esse \(x_i\). O número total de amostras \(m\) pode ser qualquer número entre 2 e \(n\)
e o número de observações \(n_j\), na amostra \(j\), \(j = 1, 2,\cdots, m\) estão sujeitos à restrição
\(n_1 + n_2 +\cdots + n_m = n\). Em particular, se não houver dois \(x_i\) iguais, existem \(n\) amostras, cada uma de uma observação
e, no outro extremo, se houver apenas duas \(x_i\) distintas, há duas amostras com número observações \(n_1\) e \(n_2 = n-n_1\),
respectivamente. Suponha que neste último caso marcamos a primeira amostra por \(x = 0\) e a segunda categoria por \(x = 1\) e os primeiros valores
de amostra são
\begin{equation}
y_{11}, y_{12}, \cdots,y_{1n_1}
\end{equation}
com média \(\mu_0\) e os valores da segunda amostra sejam
\begin{equation}
y_{21}, y_{22}, \cdots,y_{2n_2}
\end{equation}
com média \(\mu_1\). Pode então ser mostrado que \(\widehat{\beta}_1 = \mu_1 - \mu_0\), a diferença de média amostral
utilizada no teste \(t\) para a igualdade das médias dos tratamentos. Assim, o teste de igualdade de médias é neste caso
idêntico ao teste \(H_0 \, : \, \beta_1 = 0\). No caso mais geral de \(m\) amostras, um teste para \(\beta_1 = 0\) é um teste para a
identidade de todas as \(m\) médias populacionais.
É bem conhecido que para o modelo clássico de mínimos quadrados o estimador de \(\beta_1\) não depende do estimador de \(\beta_0\),
mas o de \(\beta_0\) depende daquele de \(\beta_1\) através de \(\widehat{\beta}_1\), já que \(\widehat{\beta}_0 = \overline{y} - \widehat{\beta}_1\overline{x}\).
A partir dessa expressão para \(\widehat{\beta}_0\) é facilmente visto que a equação ajustada pode ser escrita sem
referência ao intercepto na forma
\begin{equation}
y \, = \, \overline{y}-\widehat{\beta}_1(x-\overline{x}),
\end{equation}
implicando que a linha passa pelo ponto \((\overline{x},\overline{y})\).
Uma interpretação gráfica disso é que a inclinação da linha ajustada é inalterada por uma mudança
de origem. Em particular, se mudarmos a origem para a média bivariada \((\overline{x},\overline{y})\) e escrevermos \(\widetilde{x}= x - \overline{x}\),
\(\widetilde{y} = y - \overline{y}\) a equação acima se torna
\begin{equation}
\widetilde{y} \, = \, \widehat{\beta}_1 \widetilde{x}
\end{equation}
e, então
\begin{equation}
\widehat{\beta}_1 \, = \, \frac{\displaystyle\sum_{1=1}^n \widetilde{x}_i\widetilde{y}_i}{\displaystyle\sum_{i=1}^n \widetilde{x}_i^2}\cdot
\end{equation}
A expressão acima ainda é válida se apenas mudarmos a origem para a média dos \(x_i\) e usarmos o \(y_i\) original.
Foi apontado que o coeficiente de correlação de Pearson permanece inalterado por transformações lineares de \((x, y)\)
da forma \(x'= (x - k)/s\) e \(y' = (y - m)/t\) onde \(s\), \(t\) ambos são positivos. Acabamos de ver que, em regressão, embora
a estimativa de \(\beta_0\) seja afetada por uma mudança na origem, a de \(\beta_1\) não é, isto é, transformações
da forma \(x'= (x - k)\), \(y' = (y - m)\) não afetam a estimativa de \(\beta_1\). Entretanto, é fácil estabelecer que a
transformação \(x'= (x - k)/s\) e \(y' = (y - m)/t\) altera tanto o valor verdadeiro de \(\beta_1\) quanto sua estimativa de
mínimos quadrados pelo mesmo fator de escala \(s/t\), alterando \(\beta_1\) para \(\beta_1'= s\beta_1/t\).
No entanto, faremos uso de outra propriedade do coeficiente de correlação de Pearson em testes permutacionais, ou seja, porque
todas as outras quantidades na expressão da estimativa do coeficiente de correlação de Pearson permanecem constantes
sob permutações, podemos basear testes de permutação na estatística \(T = \sum_i x_iy_i\) no caso do
coeficiente de Pearson como alternativa ao uso do coeficiente de correlação amostral \(r\). Uma propriedade correspondente
é transferida para o coeficiente de Spearman com postos substituindo os \(x_i\), \(y_i\).
Descartando a suposição de normalidade para o \(Y_i\), fazer inferências sobre \(\beta_0\) e \(\beta_1\) são difíceis,
então consideramos primeiro a estimação apenas de \(\beta_1\). O problema reduz-se então a fazer inferências
sobre diferenças em medianas ou médias amostrais marcadas pelos diferentes \(x_i\). Para qualquer \(Y_i,Y_j\) independentes, associados
com \(x_i,x_j\) distintos, descartamos as suposições de normalidade nas distribuições condicionais de \(Y | x\) e
assumimos agora apenas que para qualquer \(x_i, x_j\) elas têm distribuições \(F_i (Y_i | x_i)\), \(F_j (Y_j | x_j)\) que
diferem apenas na sua medida de centralidade que será tomada em geral como a mediana, mas que coincidirá com a média das
distribuições condicionais que são assumidas simétricas, desde que a média exista. Para o modelo de regressão
linear, a mediana de \(F_i(Y_i|x_i)\) é \(\mbox{Mediana}(Y_i|x_i)=\beta_0+\beta_1 x_i\) e aquela de \(F_j(Y_j|x_j)\) é
\(\mbox{Mediana}(Y_j|x_j)=\beta_0+\beta_1 x_j\), sendo estes os análogos da estimativa do coeficiente de correlação e a
diferença entre as medianas é claramente
\begin{equation}
\mbox{Mediana}(Y_j-Y_i|x_i,x_j)=\beta_1 (x_j-x_i)\cdot
\end{equation}
Assumindo que as diferenças entre as distribuições estão confinadas a uma diferença mediana implica que,
para todo \(i\)
\begin{equation}
D_i(\beta_1) = Y_i-\beta_1x_i,
\end{equation}
são distribuídas de forma idêntica e independente com mediana \(\beta_0\). Como os \(D_i\) são, portanto, independentes
do \(x_i\), segue-se que eles não são correlacionados com o \(x_i\). Como apontamos, o \(x_i\) pode ser alterado pela adição
ou subtração de uma constante sem afetar a inclinação ou sua estimativa. Em particular, ele simplificará a álgebra
se ajustarmos o \(x_i\) adicionando uma constante apropriada para fazer \(\sum_i x_i = 0\), o que, em termos gráficos, implica mudar a origem
para um ponto no eixo \(x\) correspondente à média \(\overline{x}\). Escrevendo \(\widehat{D}_i = y_i - \beta x_i\) um teste intuitivamente
razoável da hipótese \(H_0 \, : \, \beta_1 = \beta\) contra uma alternativa de um ou dois lados é um teste para a correlação
zero entre o \(x_i\) e o \(\widehat{D}_i\), pois sabemos que se \(H_0\) é válido então \(D_i(\beta)\) não é correlacionado
com o \(x_i\) e os \(\widehat{D}_i\) são valores observados da variável \(D_i(\beta)\). Se o teste mais apropriado é baseado em Pearson,
Spearman, Kendall ou algum outro coeficiente dependerá de quais suposições sejam feitas sobre as características da
distribuição \(F(Y|x)\), por exemplo, cauda longa, simétrica ou assimétrica, etc.. Nós chamamos os \(\widehat{D}_i\) de resíduos
por conveniência, mas este é um uso não ortodoxo do termo que mais convencionalmente se refere ao
\(\widehat{\epsilon}_i = y_i - \alpha - \beta x_i\) onde \(\alpha\) é algum valor hipotético de \(\beta_0\). Uma estatística apropriada
baseada no coeficiente de Pearson para o teste de correlação zero é
\begin{equation}
T(\beta) \, = \, \sum_{i=1}^n x_i\widehat{D}_i \, = \, \sum_{i=1}^n x_i (y_i - \beta x_i)\cdot
\end{equation}
Devemos lembrar que se tivermos medições em duas variáveis para uma amostra de \(n\) indivíduos, estas observações
emparelhadas podem ser escritas como \((x_1, y_1), (x_2, y_2),\cdots , (x_n, y_n)\). O coeficiente de correlação amostral de produto de momentos
de Pearson \(r\), é definido como
\begin{equation}
r \, = \, \frac{\sum_i\Big( (x_i-\overline{x})(y_i - \overline{y})\Big)}{\sqrt{\sum_i (x_i-\overline{x})^2\sum_i(y_i-\overline{y})^2}},
\end{equation}
que, para fins computacionais, é geralmente reordenada e escrita como
\begin{equation}
r \, = \, \frac{C_{xy}}{\sqrt{C_{xx}C_{yy}}},
\end{equation}
sendo \(C_{xy}=\sum_i x_iy_i-(\sum_i x_i)(\sum_i y_i)/n\), \(C_{xx}=\sum_i x_i^2-(\sum_i x_i)^2/n\) e \(C_{yy}=\sum_i y_i^2-(\sum_i y_i)^2/n\).
Voltando ao nosso desenvolvimento. Observemos que, para estimar \(\beta\), um procedimento de estimação intuitivamente razoável
é resolver para \(\beta\) a equação
\begin{equation}
T(\beta) \, - \, \sum_{i=1}^n x_i \sum_{i=1}^n \widehat{D}_i/n \, = \, 0\cdot
\end{equation}
Isso segue da forma de \(C_{xy}\), já que equalizar \(C_{xy}\) a zero garante um valor zero para o coeficiente de correlação amostral,
uma vez que torna o numerador do coeficiente de correlação amostral de Pearson zero. Lembrando que podemos ajustar o \(x_i\) para ter
a média zero, ou seja, de modo que \(\sum_i x_i = 0\) sem afetar nossa estimativa de \(\beta\), assumimos que isso foi feito para que
a equação acima simplifique para
\begin{equation}
T(\beta) \, = \, \sum_{i=1}^n x_i( y_i - \beta x_i) \, = \, 0,
\end{equation}
com solução \(\widehat{\beta}=(\sum_i x_i y_i)/(\sum_i x_i^2)\).
Não fizemos suposições sobre a distribuição do \(D_i\) exceto que eles são idênticos para todos os \(i\),
de modo que, para o teste de hipótese, um teste de permutação para o coeficiente de correlação de Pearson ser zero
com base nos valores amostrais \((x_i, \widehat{D}_i)\) é apropriado. Como indicamos em outros casos, uma dificuldade com inferências baseadas
em dados brutos usando um teste de permutação é que os resultados tendem a ser similares àqueles baseados na teoria equivalente,
assumindo normalidade mesmo quando a suposição de normalidade é claramente violada. Em outras palavras, o método não
tem robustez. Melhores procedimentos para lidar com dados são geralmente fornecidos por procedimentos de estimação baseados em
classificação.
Vejamos como fazer inferências baseadas no coeficiente \(\tau_K\) de Kendall, sabemos que \(\tau_K\) depende apenas da ordem das observações
e não da magnitude das diferenças entre os valores dos dados. Além disso, não há vantagem em ajustar o \(x_i\) para
terem média zero. Simplifica a apresentação sem perda de generalidade se, quando os \(x_i\) são todos diferentes, assumimos
que \(x_1 < x_2 \cdots < x_n\).
A estatística usada para inferência sobre \(\beta\) é
\begin{equation}
T_t(\beta) \, = \, \sum_i \mbox{sgn}\big( \widehat{D}_{ij}(\beta)\big),
\end{equation}
onde
\begin{equation}
\begin{array}{rcl}
\widehat{D}_{ij}(\beta) & = & (y_j - \widehat{\beta}_0 - \widehat{\beta} x_j) - (y_i - \widehat{\beta}_0 - \widehat{\beta} x_i)
\, = \, (y_j - \widehat{\beta} x_j) - (y_i - \widehat{\beta} x_i) \\
& = & \widehat{D}_{j} - \widehat{D}_{i} \, = \, (y_j - y_i) - \widehat{\beta}(x_j - x_i)
\end{array}
\end{equation}
e e soma dos sinais dos \(\widehat{D}_{ij}\) é sobre todo \(i=1,2,\cdots,n-1\) e \(j> i\). Como os \(x_i\) são todos
diferentes e em ordem ascendente é claro que \(T_t(\beta)\) é o numerador na expressão da estatística de
teste para verificar nulidade do coeficiente \(\tau_K\) composto dos números de concordâncias menos o número de
discordâncias nos pares de dados \((x_i,\widehat{D}_i)\).
O uso de uma estatística equivalente a \(T_t(\beta)\) foi proposto pela primeira vez por Theil (1950) e o procedimento é amplamente
conhecido como o método de Theil. Sen (1968) destacou a relação com o coeficiente \(\tau_K\) de Kendall, então
nos referimos a ele como o método Theil-Kendall ou estimador Theil-Sen.
Claramente \(T_t(\beta)\) é uma função linear do estimador amostral de \(\tau_K\) e um estimador de pontual
apropriado de \(\beta\) é obtido ajustando-se \(T_t(\beta) = 0\). Como os \(x_i\) estão em ordem ascendente é
fácil ver que \(T_t(\beta)\) não é alterada se substituirmos \(\widehat{D}_{ij}(\beta)\) por \(\widehat{B}_{ij} - \beta\)
onde, \(\widehat{B}_{ij} = (y_j - y_i)/(x_j - x_i)\). Claramente, então, \(T_t(\beta) = 0\), se escolhermos \(\beta = mediana(\widehat{B}_{ij})\),
então o número de positivos e o número de \(\widehat{D}_{ij}\) negativos serão iguais.
Como foi o caso de \(T_s(\beta)\), percebemos que apenas \(T_t(\beta)\) muda de valor quando \(\beta\) passa por um valor de \(\widehat{B}_{ij}\)
e como a estatística é o numerador do coeficiente \(\tau_K\) de Kendall, segue-se que se todos os \(\widehat{B}_{ij}\) são
distintos quando \(\beta\) aumenta de \(-\infty\) para \(\infty\), \(T_t(\beta)\) é uma função degrau decrescente por passos
de 2 desde ½\( n(n-1)\) para -½\(n(n - 1)\). Claramente a divisão de \(T_t(\beta)\) por ½\( n(n-1)\) leva ao \(t_K\)
de Kendall, que pode ser usado como uma estatística equivalente. Se os \(\widehat{D}_{ij}\) não forem todos distintos, alguns
dos passos serão múltiplos de 2. Em particular, se um \(\widehat{D}_{ij}\) ocorre \(r\) vezes, ele induz um degrau de altura \(2r\).
O valor de \(T_t(\beta)\) em qualquer \(\widehat{D}_{ij}\) pode ser considerado como a m&eacudia;dia dos valores imediatamente acima e abaixo
daquele \(\widehat{D}_{ij}\).
Testes de hipóteses sobre \(\beta\) são diretos usando ou o \(t_K\) de Kendall ou o equivalente \(T_t(\beta)\) como a estatística de
teste e se sabemos a distribuição exata do coeficiente de Kendall amostral quando \(\tau_K = 0\), um intervalo de confiança
para \(\beta\) pode ser obtido. Os procedimentos estão ilustrados no Exemplo a seguir.
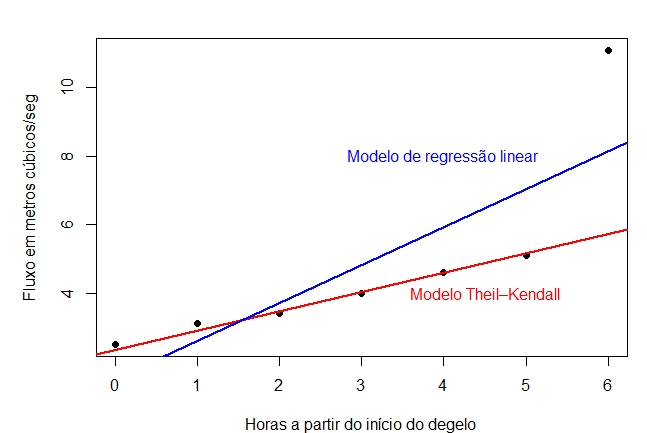
Exemplo IV.2. O fluxo de água em metros cúbicos por segundo \(y\), em um ponto fixo de um córrego da
montanha, é registrado em intervalos de uma hora \(x\) após um degelo de neve começando no tempo \(x = 0\).
| Horas a partir do início do degelo \(x\) | | 0 | | 1 | | 2 | | 3 | | 4 | | 5 |
| 6 | |
|
| Fluxo em metros cúbicos/seg \(y\) | | 2.5 | | 3.1 | | 3.4 | | 4.0 | | 4.6 |
| 5.1 | | 11.1 | |
Durante os degelos anteriores, tem havido frequentemente uma relação quase linear entre o tempo e o fluxo. Use o método de Theil-Kendall para:
- (i) testar a hipótese \(H_0 : \beta_1 = 1\) contra a alternativa \(H_1: \beta_1\neq 1\);
- (ii) obter uma estimativa pontual de \(\beta_1\) e um intervalo de confiança que dê pelo menos 95 por cento de cobertura.
Primeiro vamos ajustar o modelo de regressão de Theil-Kendall ou Theil-Sen, para isso utilizamos a função mblm no
pacote homônimo.
> library(mblm)
> horas = c(0,1,2,3,4,5,6)
> fluxo = c(2.5,3.1,3.4,4,4.6,5.1,11.1)
> ajuste0 = mblm(fluxo ~ horas, repeated = FALSE)
> ajuste1 = lm(fluxo ~ horas)
> summary(ajuste0)
Call:
mblm(formula = fluxo ~ horas, repeated = FALSE)
Residuals:
1 2 3 4 5 6 7
0.16667 0.20000 -0.06667 -0.03333 0.00000 -0.06667 5.36667
Coefficients:
Estimate MAD V value Pr(>|V|)
(Intercept) 2.33333 0.09884 28 0.0156 *
horas 0.56667 0.09884 231 6.39e-05 ***
---
Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Residual standard error: 2.403 on 5 degrees of freedom
> par(mfrow = c(1,1), mar = c(4, 5, 2, 1), pch = 19)
> plot(fluxo ~ horas, pch = 19, xlab = "Horas a partir do início do degelo",
ylab = "Fluxo em metros cúbicos/seg")
> abline(ajuste0, lty = 1, lwd = 2, col = "red")
> text(4.5,4, "Modelo Theil–Kendall", col = "red")
> abline(ajuste1, lty = 1, lwd = 2, col = "blue")
> text(4,8, "Modelo de regressão linear", col = "blue")
No gráfico a seguir mostramos o comportamento do modelo de regressão linear assim como do modelo não paramémetrico
de Theil-Kendall ou Theil-Sen.
A regressão de Kendall-Theil é uma abordagem completamente não-paramétrica à regressão linear, onde existe
uma variável independente e uma variável dependente. É robusto para outliers na variável dependente, como podemos perceber.
Ele simplesmente calcula todas as linhas entre cada par de pontos e usa a mediana das inclinações dessas linhas. O método produz
um declive e um intercepto para a linha de ajuste, assim como um p-valor para a inclinação também pode ser determinado. Normalmente,
nenhuma medida análoga ao \(R^2\) é relatada. Na Seção IV.2.1 Avaliando a qualidade do ajuste, estudaremos uma forma alternativa
de escrever \(R^2\) que poderemos utilizar nesta situação.
Para testar a hipótese em (i), observemos que inspeção mostra que a estimativa pontual de \(\beta_1\), ou seja, \(\mbox{mediana}(\widehat{B}_{ij})\)
é 0.567, porque há dez maiores e dez menores \(\widehat{B}_{ij}\).
> ajuste0$slopes
[1] 0.6000000 0.4500000 0.5000000 0.5250000 0.5200000 1.4333333 0.3000000 0.4500000
[9] 0.5000000 0.5000000 1.6000000 0.6000000 0.6000000 0.5666667 1.9250000 0.6000000
[17] 0.5500000 2.3666667 0.5000000 3.2500000 6.0000000
> median(ajuste0$slopes)
[1] 0.5666667
Para testar a hipótese \(\beta_1 = 1\) subtraímos \(\beta_1 = 1\) de cada \(\widehat{B}_{ij}\)
> ajuste0$slopes-1
[1] -0.4000000 -0.5500000 -0.5000000 -0.4750000 -0.4800000 0.4333333 -0.7000000 -0.5500000
[9] -0.5000000 -0.5000000 0.6000000 -0.4000000 -0.4000000 -0.4333333 0.9250000 -0.4000000
[17] -0.4500000 1.3666667 -0.5000000 2.2500000 5.0000000
e encontramos que isto implica 15 discordâncias ou valores negativos e 6 concordâncias, onde
\begin{equation}
T_t(1) = 6 - 15 = –9,
\end{equation}
e quando \(n = 7\), isto implica que, \(t_K = –9/21 = 0.4286\).
> library(SuppDists)
> 2*pKendall(abs(-9/21), N = 7, lower.tail = FALSE)
[1] 0.1361111
O pacote SuppDists incorpora ao R diversas distribuições suplementares, entre elas, a distribuição exata
do coeficiente de correlação \(\tau_K\) de Kendall. Utilizamos as linhas de comando acima para avaliarmos evidências a favor ou
contra \(H_0\). Correspondendo a este valor de \(t_K\) com \(N=7\), os sete pares de dados, o \(p-valor = 0.1361111\) é exatamente bilateral
de modo que não há evidência convincente contra \(H_0\).
Para obter um intervalo de confiança aproximado de 95 por cento para \(\beta_1\), devemos primeiro determinar um valor de \(|T_t|\) com cauda
o mais próxima possível, mas não superior a 0.025.
> qKendall(0.025, N = 7)*21
[1] -13
> qKendall(0.975, N = 7)*21
[1] 13
Para obter um intervalo de confiança aproximado de 95 por cento para \(\beta_1\), devemos primeiro determinar um valor de \(|T_t|\) com uma
cauda o mais próximo possível, mas não superior a 0.025. A distribuição exata quando \(n = 7\) dado pelo R indica
que para probabilidade na cauda de 0.025, \(T_t = 13\). Obtemos o intervalo
> n = 7
> denom = 0.5*n*(n-1)
> Tt = 13
> Tt/denom
[1] 0.6190476
> 1 - 0.6190476 + qnorm(0.975)*(13/21)/n
[1] 0.5542825
> 1 + Tt/denom + qnorm(0.975)*(13/21)/n
[1] 1.792378
ou (0.5542825,1.792378).
A estreita relação entre o \(\tau_K\) de Kendall e o \(T_t\) facilita o transporte de aproximações assintóticas
entre eles. Usando os resultados para \(\tau_K\) pode-se mostrar (Maritz, 1995) que
\begin{equation}
\mbox{E}(T_t) = 0 \qquad \mbox{ e que } \qquad \mbox{Var}(T_t) = \frac{n (n - 1) (2n + 5)}{18}\cdot
\end{equation}
Para grandes \(n\) a distribuição de \(Z = T_t / \sqrt{\mbox{Var}(T_t)}\)
é aproximadamente normal e inferências assintóticas podem então ser feitas da maneira usual. Mesmo para \(n = 7\),
a aproximação às vezes não é seriamente enganosa, mas recomenda-se cautela com uma amostra tão pequena.
A regressão de Kendall-Theil também chamada de regressão de Theil-Sen é uma robusta substituição não-paramétrica
da abordagem tradicional de mínimos quadrados ao modelo de regressão de linha reta \(Y = \beta_0 + \beta_1x + \epsilon\) e também
a alguns modelos de regressão linear mais complexos. Esta metodologia não exige normalidade dos erros aleatórios, sendo capaz
de fornecer estimativas dos parâmetros, testes de hipóteses lineares sobre os parâmetros, bem como intervalos de confiança
para os parâmetros. Ver, por exemplo, Hollander, M. et. all. (2014) para uma descrição mais detalhada do método.
Como observamos anteriormente, todos os estimadores não-paramétricos aqui considerados são suavizadores lineares. A
definição formal é a seguinte.
Definição IV.1. Um estimador \(\widehat{r}_n\) de \(r\) é um suavizador linear se, para cada \(x\), existe
um vetor \(\mathcal{l}(x)=(\mathcal{l}_1(x),\cdots,\mathcal{l}_n(x))^\top\) tal que
\begin{equation}
\widehat{r}_n(x) \, = \, \sum_{i=1}^n \mathcal{l}_i(x)Y_i\cdot
\end{equation}
Definindo o vetor de valores ajustados
\begin{equation}
\widehat{r}_n(x) \, = \, \big( \widehat{r}_n(x_1),\cdots,\widehat{r}_n(x_n)\big)^\top,
\end{equation}
segue-se então que
\begin{equation}
\widehat{r}_n(x) \, = \, LY,
\end{equation}
onde \(L\) é uma matriz \(n\times n\) cuja \(i\)-ésima linha é \(\mathcal{l}_i(x)^\top\), assim, \(L_{ij} = \mathcal{l}_j(x_i)\).
As entradas da \(i\)-ésima linha mostram os pesos dados a cada \(Y_i\) na formação da estimativa \(\widehat{r}_n(x_i)\).
Definição IV.2. A matriz \(L\) é chamada matriz de suavização. A \(i\)-ésima
linha de \(L\) é chamada de kernel efetivo para estimar \(r(x_i)\). Definimos os graus de liberdade efetivos como
\begin{equation}
\nu \, = \, \mbox{tr}(L)\cdot
\end{equation}
O leitor não deve confundir suavizadores lineares com regressão linear, em que se assume que a função de
regressão \(r(x)\) é linear. Devemos observar que os pesos em todos os suavizadores que usaremos terão a propriedade
que, para todo \(x\), \(\sum_{i=1}^n \mathcal{l}_i(x) = 1\). Isto implica que o suavizador preserva curvas constantes, portanto, se
\(Y_i = c\) para todo \(i\), então \(\widehat{r}_n(x) = c\).
Exemplo IV.3. (Regressograma) Suponhamos que \(a\leq x_i\leq b\), para \(i=1,2,\cdots,n\). Vamos dividir o intervalo \((a,b)\) em \(m\) caixas
igualmente espaçadas denotadas por \(B_1,B_2,\cdots,B_m\). Definamos \(\widehat{r}_n(x)\) por
\begin{equation}
\widehat{r}_n(x) \, = \, \frac{1}{n_j} \sum_{\{ \, i \, : \, x\in B_i \, \}}Y_i, \qquad \forall x\in B_j,
\end{equation}
sendo que \(n_j\) é o número de pontos em \(B_j\). Em outras palavras, a estimativa de \(\widehat{r}_n\) é uma função
de passo obtida pela média do \(Y_i\) sobre cada caixa. Essa estimativa é chamada de
regressograma. Um exemplo
é apresentado nas Figuras abaixo. Para \(x\in B_j\) definamos \(\mathcal{l}_i(x) = 1/n_j\) se \(x_i\in B_j\) e \(\mathcal{l}_i(x)=0\)
caso contrário. Assim, \(\widehat{r}_n(x)=\sum_{i=1}^n Y_i\mathcal{l}_i(x)\). O vetor de pesos \(\mathcal{l}(x)\) se parece com isso:
\begin{equation}
\mathcal{l}(x)^\top \, = \, \Big( 0,0,\cdots,0,\frac{1}{n_j},\cdots,\frac{1}{n_j},0,\cdots,0\Big)\cdot
\end{equation}
Para ver como a matriz de suavização \(L\) se parece, suponha que \(n = 9\), \(m = 3\) e \(n_1 = n_2 = n_3 = 3\). Então
\begin{equation}
L \, = \, \frac{1}{3}\times \begin{pmatrix} 1 & 1 & 1 & 0 & 0 & 0 & 0 & 0 & 0 \\ 1 & 1 & 1 & 0 & 0 & 0 & 0 & 0 & 0 \\
1 & 1 & 1 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 1 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 1 & 1 & 0 & 0 & 0 \\
0 & 0 & 0 & 1 & 1 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1 & 1 & 1 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1 & 1 & 1 \\
0 & 0 & 0 & 0 & 0 & 0 & 1 & 1 & 1 \end{pmatrix}\cdot
\end{equation}
Em geral, é fácil ver que existem \(\nu = \mbox{tr}(L) = m\) graus de liberdade efetivos. A largura de banda \(h=(b-a)/m\) controla
a suavidade da estimativa e a matriz de alisamento \(L\) tem a forma.
 |
 |
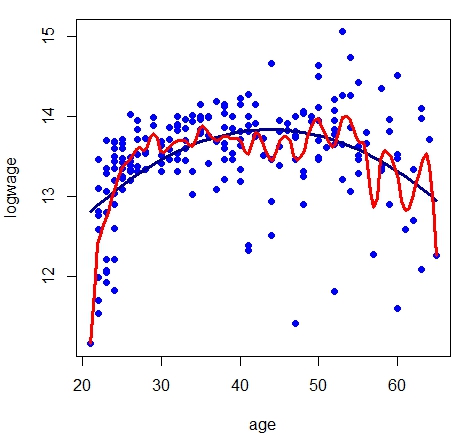
Vamos utilizar os dados do Exemplo IV.1 com os resultados do modelo de regressão linear. Para construir as figuras acima fizemos
alterações ao comando regressogram disponível no pacote de funções HoRM.
Como padrão a função regressogram devolve o gráfico de dispersão e a curva de
regressão não paramétrica estimada pelo suavizamento linear. Como mostramos nas linhas de comando a seguir.
> library(HoRM)
> regressogram(cps71$age, cps71$logwage, x.lab = "age", y.lab = "logwage",
nbins = 10, main = "Regressograma", show.bins = FALSE,
show.means = FALSE, show.lines = TRUE)
> regressogram(cps71$age, cps71$logwage, x.lab = "age", y.lab = "logwage",
nbins = 20, main = "Regressograma")
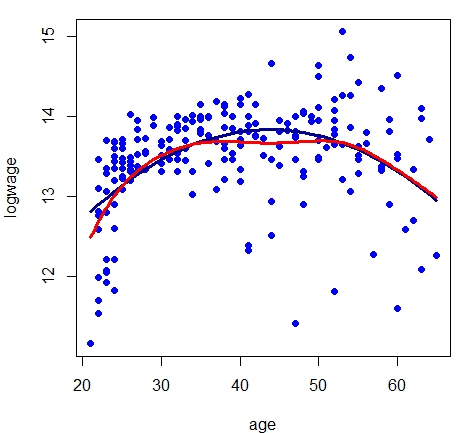
Com estes comandos obtemos duas figuras mostrando o ajuste de regressograma com \(m=10\) e \(m=20\) caixas, respectivamente. Isto foi obtido
modificando o valor da opção \(nbins\). Um problema é que gostariamos de apresentar conjuntamente com o regressograma o
ajuste do modelo de regressão paramétrico. Como isso não é possível modificamos apropriadamente a função
segundo nosso interesse, como mostramos a seguir.
> regressograma = function (x, y, nbins = 10) {
xy <- data.frame(x = x, y = y)
xy <- xy[order(xy$x), ]
z <- cut(xy$x, breaks = seq(min(xy$x), max(xy$x), length = nbins +
1), labels = 1:nbins, include.lowest = TRUE)
xyz <- data.frame(xy, z = z)
MEANS <- c(by(xyz$y, xyz$z, FUN = mean))
x.seq <- seq(min(x), max(x), length = nbins + 1)
midpts <- (x.seq[-1] + x.seq[-(nbins + 1)])/2
d2 <- data.frame(midpts = midpts, MEANS = MEANS)
return(d2)
}
> model.par.1 = regressograma(cps71$age, cps71$logwage, nbins = 10)
> model.par.2 = regressograma(cps71$age, cps71$logwage, nbins = 20)
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(model.par.1$midpts, model.par.1$MEANS, col = "red", lwd = 3)
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(model.par.2$midpts, model.par.2$MEANS, col = "red", lwd = 3)
Podemos perceber com este exemplo que o regressograma aproxima-se do modelo paramétrico, embora o regressograma sirva mais como
descrição dos dados e não como interpretação. O regressograma não é a única forma de
encontrarmos um suavizamento linear. Vejamos no seguinte exemplo uma outra forma de definirmos um destes modelos.
Exemplo IV.4. (Médias locais) Fixemos \(h> 0\) e definamos \(B_x = \{i \, : \, |x_i-x|\leq h\}\). Seja \(n_x\) o número de pontos em \(B_x\).
Para qualquer \(x\) para o qual \(n_x> 0\) definamos
\begin{equation}
\widehat{r}_n(x) \, = \, \frac{1}{n_x}\sum_{i\in B_x} Y_i\cdot
\end{equation}
Este é o estimador médio local de \(r(x)\), um caso especial do estimador kernel a ser discutido em breve. Nesse caso,
\(\widehat{r}_n(x) = \sum_{i=1}^n Y_i\mathcal{l}_i(x)\) onde \(\mathcal{l}_i(x) = 1 / n_x\) se \(|x_i - x |\leq h\) e \(\mathcal{l}_i(x) = 0\)
caso contrário. Como exemplo simples, suponha que \(n = 9\), \(x_i = i / 9\) e \(h = 1/9\). Então,
\begin{equation}
L \, = \, \begin{pmatrix} 1/2 & 1/2 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 1/3 & 1/3 & 1/3 & 0 & 0 & 0 & 0 & 0 & 0 \\
0 & 1/3 & 1/3 & 1/3 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 1/3 & 1/3 & 1/3 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1/3 & 1/3 & 1/3 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & 1/3 & 1/3 & 1/3 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1/3 & 1/3 & 1/3 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1/3 & 1/3 & 1/3 \\
0 & 0 & 0 & 0 & 0 & 0 & 0 & 1/2 & 1/2 \end{pmatrix}\cdot
\end{equation}
Maiores detalhes ver o lvro de Fan & Gijbels (1996).
É desejável usar uma medida, livre de unidade, para mensurar a adequação de modelos de regressão não
paramétricos que seja comparável àquela usada para modelos de regressão paramétrica, a saber, \(R^2\). Note
que esta será uma medida dentro da amostra da qualidade de ajuste. Dadas as desvantagens conhecidas de computar \(R^2\) com base na
decomposição da soma dos quadrados, há uma definição e um método alternativos para calcular \(R^2\), que
pode ser usado diretamente para qualquer modelo, linear ou não linear.
Definição IV.3. Seja \(Y_i\) a resposta e \(\widehat{r}_n(x_i)\) a resposta estimada para a \(i\)-ésima
observação. Definimos \(R^2\) como segue:
\begin{equation}
R^2 \, = \, \frac{\displaystyle \Big( \sum_{i=1}^n (y_i-\overline{y})(\widehat{r}_n(x_i)-\overline{y})\Big)^2}
{\displaystyle \sum_{i=1}^n (y_i-\overline{y})^2 \sum_{i=1}^n (\widehat{r}_n(x_i)-\overline{y})^2},
\end{equation}
onde \(y_1,\cdots,y_n\) são as observações da resposta e \(\overline{y}\) a estimativa da média.
Esta medida estará sempre no intervalo \([0,1]\) com o valor 1 denotando um ajuste perfeito aos dados da amostra e 0 denotando nenhum
poder preditivo acima daquele dado pela média incondicional da resposta. Pode ser demonstrado que este método de cálculo do \(R^2\)
é idêntico à medida padrão computada como \(\sum_{i=1}^n (\widehat{\mu}_i-\overline{y})^2/\sum_{i=1}^n (y_i-\overline{y})^2\)
quando o modelo é linear, obtido por mínimos quadrados e incluindo o termo do intercepto. Nesta expressão \(\widehat{\mu}=X\widehat{\beta}\)
é o vetor de estimativas do preditor linear.
Esta medida útil permitirá a comparação direta entre a adequação da amostra e a qualificação
óbvia de que este não é, de forma alguma, um critério de seleção de modelos e sim simplesmente uma medida resumida que podemos relatar.
Devemos observar que em situações nas quais agrupamos informações, como é o caso do regressograma, não
é possível utilizarmos este coeficiente.
Os suavizadores que usaremos dependerão de algum parâmetro de suavização e precisaremos de alguma maneira de
escolher \(h\). Definamos o risco como o erro quadrático médio
\begin{equation}
R(h) \, = \, \mbox{E}\Big( \frac{1}{n}\sum_{i=1}^n \big( \widehat{r}_n(x_i)-r(x_i)\big)^2 \Big)\cdot
\end{equation}
Idealmente, gostaríamos de escolher \(h\) como aquele que minimizar \(R(h)\), mas \(R(h)\) depende da funç:ão desconhecida
\(r(x)\). Em vez disso, minimizaremos uma estimativa \(\widehat{R}(h)\) de \(R(h)\). Como primeiro palpite, podemos usar a média da
soma de quadrados dos resíduos, também chamadas de erro de treinamento
\begin{equation}
\frac{1}{n}\sum_{i=1}^n \big( Y_i-\widehat{r}_n(x_i)\big)^2
\end{equation}
para estimar \(R(h)\). Isto acaba por ser uma estimativa pobre de \(R(h)\): é tendenciosa para baixo e tipicamente leva a
subsuavizamento (sobreajuste). A razão é que estamos usando os dados duas vezes: para estimar a função e
estimar o risco. A estimativa de função é escolhida para fazer \(\sum_{i=1}^n \big( Y_i-\widehat{r}_n(x_i)\big)^2\)
pequeno, o que tenderá a subestimar o risco.
Estimaremos o risco usando validação cruzada, que é definida da seguinte forma.
Definição IV.4. O estimador de validação cruzada do risco é definido por
\begin{equation}
\widehat{R}(h) \, = \, \frac{1}{n}\sum_{i=1}^n \big( Y_i-\widehat{r}_{-i}(x_i)\big)^2,
\end{equation}
onde \(\widehat{r}_{-i}\) é o estimador obtido omitindo o \(i\)-ésimo par \((x_i,Y_i)\).
Como dito acima, esta definição está incompleta. Nós não dissemos o que queremos dizer precisamente por
\(\widehat{r}_{-i}\). Vamos definir
\begin{equation}
\widehat{r}_{-i}(x) \, = \, \sum_{j=1}^n Y_j\mathcal{l}_{j,(-i)}(x),
\end{equation}
onde
\begin{equation}
\mathcal{l}_{j,(-i)}(x) \, = \, \left\{ \begin{array}{cc} 0, & \mbox{ se } j = i \\
\frac{\displaystyle\mathcal{l}_j(x)}{\displaystyle\sum_{k\neq i} \mathcal{l}_k(x)}, & \mbox{ se } j\neq i \end{array}\right.\cdot
\end{equation}
Em outras palavras, definimos o peso em \(x_i\) para 0 e renormalizamos os outros pesos para somar um. Para todos os métodos a serem
considerados: regressão kernel, polinômios locais e suavização por splines, essa forma para \(\widehat{r}_{-i}\)
pode realmente ser derivada como uma propriedade do método, em vez de uma questão de definição. Mas é
mais simples tratar isso como uma definição.
A intuição da validação cruzada é a seguinte. Observe que
\begin{equation}
\begin{array}{rcl}
\mbox{E}\big( Y_i-\widehat{r}_{-i}(x_i)\big)^2 & = & \mbox{E}\big( Y_i-r(x_i)+r(x_i)-\widehat{r}_{-i}(x_i)\big)^2 \\
& = & \sigma^2 \, + \, \mbox{E}\big( r(x_i)-\widehat{r}_{-i}(x_i)\big)^2 \, \approx \, \sigma^2 \, + \,
\mbox{E}\big( r(x_i)-\widehat{r}_n(x_i)\big)^2,
\end{array}
\end{equation}
e, portanto,
\begin{equation}
\mbox{E}(\widehat{R}) \, \approx \, R \, + \, \sigma^2 \, = \, \mbox{risco preditivo}\cdot
\end{equation}
Assim, o escore de validação cruzada é uma estimativa quase imparcial do risco.
Parece que pode ser demorado avaliar \(\widehat{R}(h)\), já que aparentemente precisamos recomputar o estimador após abandonar
cada observação. Felizmente, existe uma fórmula de atalho para calcular \(\widehat{R}\) para suavizadores lineares e
apresentada no seguinte teorema.
Teorema IV.2.
Seja \(\widehat{r}_n\) um suavizador linear. Então, o estimador de validação cruzada do risco \(\widehat{R}(h)\)
pode ser escrito como
\begin{equation}
\widehat{R}(h) \, = \, \frac{1}{n}\sum_{i=1}^n \Big( \frac{Y_i-\widehat{r}_n(x_i)}{1-L_{ii}}\Big)^2,
\end{equation}
onde \(L_{ii}=\mathcal{l}_i(x_i)\) é o \(i\)-ésimo elemento da diagonal principal da matriz de suavização \(L\).
Demonstração.
Ver Fan and Gijbels (1996).▉
O parâmetro de suavização \(h\) pode ser escolhido minimizando \(\widehat{R}(h)\). É importante notar que não
podemos supor que \(\widehat{R}(h)\) sempre tenha um mínimo bem definido. Devemos sempre traçar \(\widehat{R}(h)\) como uma
função de \(h\). Embora interessante, não será desta maneira que encontraremos o valor estimado do parâmetro de
suavização.
Em vez de minimizar o escore de validação cruzada, uma alternativa é usar uma aproximação chamada validação
cruzada generalizada na qual cada \(L_{ii}\) na equação do Teorema IV.2 é substituída por sua média
\(\frac{1}{n}\sum_{i=1}^n L_{ii} = \nu/n\) onde \(\nu = \mbox{tr}(L)\) são os graus efetivos de liberdade. Assim, nós
minimizaríamos
\begin{equation}
GCV(h) \, = \, \frac{1}{n}\sum_{i=1}^n \frac{1}{n}\sum_{i=1}^n \Big( \frac{Y_i-\widehat{r}_n(x_i)}{1-\nu/n}\Big)^2 \cdot
\end{equation}
Geralmente, a largura de banda \(\widehat{h}\) que minimiza o escore de validação cruzada generalizada está próximo
da largura de banda que minimiza a validação cruzada.
Utilizando a aproximação \((1-x)^{-2} \approx 1+2x\) vemos que
\begin{equation}
GCV(h) \, \approx \, \frac{1}{n}\sum_{i=1}^n \big( Y_i-\widehat{r}_n(x_i)\big)^2 \, + \, \frac{2\nu\widehat{\sigma}^2}{n} \, = \, C_p,
\end{equation}
onde \(\widehat{\sigma}^2=n^{-1}\sum_{i=1}^n \big( Y_i-\widehat{r}_n(x_i)\big)^2\). A equação acima é conhecida como
a estatística \(C_p\) a qual foi originalmente proposta por Colin Mallows como critério para selecionar variáveis nos
modelos de regressão linear. Mais geralmente, muitos critérios comuns de seleção de largura de banda podem
ser escritos na forma
\begin{equation}
B(h) \, = \, \mathcal{D}(n,h)\times \frac{1}{n}\sum_{i=1}^n \big( Y_i-\widehat{r}_n(x_i)\big)^2,
\end{equation}
para diferentes escolhas de \(\mathcal{D}(n,h)\). Veja Härdle et al. (1988) para detalhes. Além disso, Härdle et al. (1988)
provou, sob condições adequadas, os seguintes fatos sobre o valor de \(\widehat{h}\) que minimiza \(B(h)\). Seja \(\widehat{h}_0\)
o valor de \(\widehat{h}\) que minimiza a perda \(L(\widehat{h}) = n^{-1}\sum_{i=1}^n \big(\widehat{r}_n(x_i)-r(x_i)\big)^2\), e seja \(h_0\)
risco mínimo. Então para todo \(\widehat{h}\), \(\widehat{h}_0\) e \(h_0\) tendem a 0 na taxa \(n^{−1/5}\). Além disso,
para certas constantes positivas \(C_1\), \(C_2\), \(\sigma_1\) e \(\sigma_2\), temos que
\begin{equation}
\begin{array}{cc}
n^{3/10}\big(\widehat{h}-\widehat{h}_0\big) \, \approx \, N(0,\sigma_1^2), & \qquad n\big(L(\widehat{h})-L(\widehat{h}_0)\big) \, \approx \, C_1\chi_1^2 \\
n^{3/10}\big(h_0-\widehat{h}_0\big) \, \approx \, N(0,\sigma_2^2), & \qquad n\big(L(h_0)-L(\widehat{h}_0)\big) \, \approx \, C_2\chi_1^2 \cdot
\end{array}
\end{equation}
Assim, a taxa relativa de convergência de \(\widehat{h}\) é
\begin{equation}
\frac{\widehat{h}-\widehat{h}_0}{\widehat{h}_0} \, = \, O_P\Big(\frac{n^{3/10}}{n^{1/5}} \Big) \, = \, O_P(n^{-1/10})\cdot
\end{equation}
Essa taxa lenta mostra que é difícil estimar a largura de banda. Essa taxa é intrínseca ao problema de
seleção de largura de banda, já que também é verdade que
\begin{equation}
\frac{\widehat{h}_0-h_0}{h_0} \, = \, O_P\Big(\frac{n^{3/10}}{n^{1/5}} \Big) \, = \, O_P(n^{-1/10})\cdot
\end{equation}
Agora nos voltamos para a regressão não paramétrica local. Suponha que \(x_i\in\mathbb{R}\) seja escalar e considere
o modelo de regressão no qual a variável resposta \(Y_i\) está relacionada com a covariável pela equação
\begin{equation}
Y_i \, = \, r(x_i) \, + \, \epsilon_i,
\end{equation}
onde \(\mbox{E}(\epsilon_i)=0\), \(i=1,2,\cdots,n\). Nesta seção, consideramos os estimadores de \(r(x)\) obtidos pela
média ponderada dos \(Y_i\), dando maior peso àqueles pontos próximos de \(x\). Começamos com o estimador de
regressão Kernel.
Definição IV.5.
Seja \(h>0\) um número positivo chamado a largura de banda. O estimador kernel Nadaraya–Watson é definido por
\begin{equation}
\widehat{r}_n(x) \, = \, \sum_{i=1}^n \mathcal{l}_i(x)Y_i,
\end{equation}
onde \(K\) é a função kernel e os pesos \(\mathcal{l}_i(x)\) são dados por
\begin{equation}
\mathcal{l}_i(x) \, = \, \frac{\displaystyle K\Big( \frac{x-x_i}{h}\Big)}{\displaystyle \sum_{j=1}^n K\Big( \frac{x-x_j}{h}\Big)}\cdot
\end{equation}
O estimador de média local no Exemplo IV.3 é um particular estimador Kernel Nadaraya–Watson. Segundo esta definição
para encontrarmos estes estimadores somente faltaria encontrar qual deve ser o valor da largura de banda \(h\), mas fixando-a temos completamente
definidos os pesos \(\mathcal{l}_i(x)\) e, portanto, o estimador \(\widehat{r}_n\).
Exemplo IV.5. (Continuação do Exemplo IV.1)
Vamos utilizar novamente os dados deste exemplo para mostrar comparativamente a curva de regressão obtida pelo estimador kernel
Nadaraya–Watson com o resultado do modelo de regressão linear paramétrico. A largura de banda é \(h = 1.892157\),
valor obtido por validação cruzada.
 |
> library(np)
> model.npar = npregbw(logwage ~ age, data = cps71, regtype = "lc")
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(cps71$age, predict(model.npar)$mean, col = "red", lwd = 3)
> summary(model.npar)
Regression Data (205 observations, 1 variable(s)):
Regression Type: Local-Constant
Bandwidth Selection Method: Least Squares Cross-Validation
Formula: logwage ~ age
Bandwidth Type: Fixed
Objective Function Value: 0.316055 (achieved on multistart 1)
Exp. Var. Name: age Bandwidth: 1.892157 Scale Factor: 0.4487742
Continuous Kernel Type: Second-Order Gaussian
No. Continuous Explanatory Vars.: 1
Estimation Time: 0.12 seconds
> predict(model.npar)$R2
[1] 0.3108675
> summary(model.par)$adj.r.squared
[1] 0.2231529
Observe que o \(R^2\) no caso paramétrico foi 0.2231529, aumentando um pouco no caso não paramétrico para \(0.3108675\).
A escolha do kernel não é muito importante. As estimativas obtidas usando kernels diferentes são geralmente
numericamente muito semelhantes. Esta observação é confirmada por cálculos teóricos que mostram que o
risco é muito insensível à escolha do kernel; veja Seção 6.2.3 de Scott (1992). Então mostramos
o resultado utilizando o kernel gaussiano, que é padrão do comando. Com esta observação vemos que especificar ou
não o kernel não é muito importante.
O que importa muito mais é a escolha da largura de banda \(h\), que controla a quantidade de suavização. Larguras de
banda pequenas fornecem estimativas muito aproximadas, enquanto larguras de banda maiores fornecem estimativas mais suaves. Em geral, vamos
deixar a largura de banda depender do tamanho da amostra, então às vezes escrevemos \(h_n\).
O teorema a seguir mostra como a largura de banda afeta o estimador. Para declarar estes resultados, precisamos fazer alguma suposição
sobre o comportamento de \(x_1,\cdots,x_n\) quando \(n\) aumenta. Para os propósitos do teorema, assumiremos que estes são escolhidos
aleatoriamente de alguma densidade \(f\).
Teorema IV.3.
O risco, usando perda de erro quadrada integrada, do estimador kernel Nadaraya-Watson é
\begin{equation}
\begin{array}{rcl}
R(\widehat{r}_n,r) & = & \displaystyle\frac{h_n^4}{4}\left(\int x^2K(x)\mbox{d}x \right)^2
\int \left(r''(x)+2r'(x)\frac{f'(x)}{f(x)} \right)^2 \mbox{d}x\\
& & \qquad \qquad \qquad \displaystyle + \frac{\displaystyle \sigma^2\int K^2(x)\mbox{d}x}{nh_n}\int \frac{1}{f(x)}\mbox{d}x
+ o(nh_n^{-1}) + o(h_n^4),
\end{array}
\end{equation}
quando \(h_n\to 0\) e \(nh_n\to \infty\).
Demonstração.
Ver Scott (1992).▉
O primeiro termo no Teorema IV.3 é o viés ao quadrado e o segundo termo é a variância. O que é especialmente
notável é a presença do termo
\begin{equation}
2r'(x)\frac{f'(x)}{f(x)}
\end{equation}
no viés. Chamamos esta expressão de viés de design, pois depende do design, ou seja, a distribuição dos
\(x_i\). Isso significa que o viés é sensível à posição dos \(x_i\). Além disso, pode-se
mostrar que os estimadores de kernel também possuem alta tendência perto dos limites. Isso é conhecido como viés
de limite. Veremos que podemos reduzir esses vieses usando um refinamento chamado regressão polinomial local.
Se diferenciarmos a expresão no Teorema IV.3 e definirmos o resultado igual a 0, veremos que a largura de banda ideal \(h_*\) é
\begin{equation}
h_* \, = \, \Big(\frac{1}{n}\Big)^{1/5}\left( \dfrac{\displaystyle \sigma^2\int K^2(x)\mbox{d}x \int \frac{1}{f(x)}\mbox{d}x}
{\displaystyle \left(\int x^2K(x)\mbox{d}x \right)^2 \int \left(r''(x)+2r'(x)\frac{f'(x)}{f(x)} \right)^2 \mbox{d}x}\right)^{1/5}\cdot
\end{equation}
Assim, \(h_*= O(n^{-1/5})\). Colocando \(h_*\) de volta na expresão do Teorema IV.3, vemos que o risco diminui na taxa \(O(n^{−4/5})\).
Na maioria dos modelos paramétricos, o risco do estimador de máxima verossimilhança diminui para 0 na taxa \(1/n\). A
taxa mais lenta \(n^{−4/5}\) é o preço de usar métodos não paramétricos. Na prática, não
podemos usar a largura de banda dada acima, já que \(h_*\) depende da função desconhecida \(r\). Em vez disso, usamos
a validação cruzada, conforme descrito no Teorema IV.2.
Os estimadores de kernel sofrem de viés de limite e viés de design. Esses problemas podem ser aliviados usando uma
generalização da regressão kernel chamada de regressão polinomial local.
Para motivar este estimador, primeiro considere escolher um estimador \(a = \widehat{r}_n(x)\) para minimizar as somas de quadrados
\(\sum_{i=1}^n (Y_i-a)^2\). A solução é a função constante \(\widehat{r}_n(x)=\overline{Y}\) que
obviamente não é um bom estimador de \(r(x)\). Agora defina a função de peso \(w_i(x)=K\big((x_i-x)/h\big)\)
e escolha um \(a = \widehat{r}_n(x)\) para minimizar as somas de quadrados ponderadas
\begin{equation}
\sum_{i=1}^n w_i(x)\big(Y_i-a\big)^2\cdot
\end{equation}
Do cálculo, vemos que a solução é
\begin{equation}
\widehat{r}_n(x) \, = \, \frac{\displaystyle\sum_{i=1}^n w_i(x)Y_i}{\displaystyle\sum_{i=1}^n w_i(x)},
\end{equation}
que é exatamente o estimador de regressão kernel. Isso nos dá uma interpretação interessante do estimador
kernel: é um estimador localmente constante, obtido a partir de mínimos quadrados ponderados localmente.
Isso sugere que podemos melhorar o estimador usando um polinômio local de grau \(p\) em vez de uma constante local. Seja \(x\) algum
valor fixo no qual queremos estimar \(r(x)\). Para valores \(u\) em uma vizinhança de \(x\), defina o polinômio
\begin{equation}
P_x(u;a) \, = \, a_0 \, + \, a_1(u-x) \, + \, \frac{a_2}{2!}(u-x)^2 \, + \, \cdots \, + \frac{a_p}{p!}(u-x)^p\cdot
\end{equation}
Podemos aproximar uma função de regressão suave \(r(u)\) em uma vizinhança do valor alvo \(x\) pelo polinômio:
\begin{equation}
r(u) \, = \, P_x(u;a)\cdot
\end{equation}
Estimamos \(a = (a_0,\cdots, a_p)^\top\) escolhendo \(\widehat{a} = (\widehat{a}_0,\cdots,\widehat{a}_p)^\top\) que minimize a soma de
quadrados ponderadas localmente
\begin{equation}
\sum_{i=1}^n w_i(x)\big( Y_i \, - \, P_x(X_i;a)\big)^2\cdot
\end{equation}
O estimador \(\widehat{a}\) depende do valor alvo \(x\), então escrevemos \(\widehat{a}(x) = (\widehat{a}_0(x),\cdots,\widehat{a}_p(x))^\top\)
se quisermos tornar essa dependência explícita. A estimativa local de \(r\) é
\begin{equation}
\widehat{r}_n(x) \, = \, P_x(u;\widehat{a})\cdot
\end{equation}
Em particular, no valor alvo \(u = x\) temos
\begin{equation}
\widehat{r}_n(x) \, = \, P_x(x;\widehat{a}) \, = \, \widehat{a}_0(x)\cdot
\end{equation}
Embora \(\widehat{r}_n(x)\) dependa apenas de \(\widehat{a}_0(x)\), isso não é equivalente a simplesmente ajustar uma
constante local.
Por exemplo, caso \(p=0\) retornamos ao estimador kernel. O caso especial em que \(p=1\) é chamado de regressão linear local
e esta é a versão que recomendamos como uma opção padrão. Como veremos, estimadores polinomiais locais
e, em particular, estimadores lineares locais possuem algumas propriedades notáveis como mostrado por Fan (1992) e Hastie e Loader (1993).
Muitos dos resultados que se seguem são desses documentos.
Para encontrar \(\widehat{a}(x)\), é útil re-expressar o problema em notação vetorial. Definamos
\begin{equation}
X_x \, = \, \begin{pmatrix} 1 & (x_1-x) & \cdots & \frac{(x_1-x)^p}{p!} \\ 1 & (x_2-x) & \cdots & \frac{(x_2-x)^p}{p!} \\
\vdots & \vdots & \ddots & \vdots \\ 1 & (x_n-x) & \cdots & \frac{(x_n-x)^p}{p!} \end{pmatrix}
\end{equation}
e seja \(W_x\) a matriz diagonal \(n\times n\) cujo componente \((i, i)\) é \(w_i(x)\). Podemos então reescrever a soma de
quadrados ponderadas localmente como
\begin{equation}
(Y-X_xa)^\top W_x(Y-X_xa)\cdot
\end{equation}
Minimizando esta expressão fornece-nos o estimador de mínimos quadrados ponderados
\begin{equation}
\widehat{a}(x) \, = \, (X_x^\top W_xX_x)^{-1}X_xW_xY\cdot
\end{equation}
Em particular, \(\widehat{r}_n(x) =\widehat{a}_0(x)\) é o produto interno da primeira linha de \((X_x^\top W_xX_x)^{-1}X_xW_xY\) com
\(Y\). Assim nós temos o seguinte teorema.
Teorema IV.4.
A estimativa de regressão polinomial local é
\begin{equation}
\widehat{r}_n(x) \, = \, \sum_{i=1}^n \mathcal{l}_i(x)Y_i,
\end{equation}
onde \(\mathcal{l}(x)^\top = (\mathcal{l}_1(x),\cdots,\mathcal{l}_n(x))\),
\begin{equation}
\mathcal{l}^\top \, = \, e_1^\top (X_x^\top W_xX_x)^{-1}X_x^\top W_x,
\end{equation}
\(e_1=(1,0,\cdots,0)^\top\) e \(X_x\) e \(W_x\) como definidos anteriormente. Este estimador têm por média
\begin{equation}
\mbox{E}\big( \widehat{r}_n(x)\big) \, = \, \sum_{i=1}^n \mathcal{l}_i(x)r(x_i)
\end{equation}
e variância
\begin{equation}
\mbox{Var}\big(\widehat{r}_n(x)\big) \, = \, \sigma^2\sum_{i=1}^n \mathcal{l}_i(x)^2 \, = \, \sigma^2||\mathcal{l}(x)||^2\cdot
\end{equation}
Demonstração.
Ver Scott (1992).▉
Mais uma vez, nossa estimativa é linear e podemos escolher a largura de banda por validação cruzada.
Exemplo IV.6. (Continuação do Exemplo IV.1)
Vamos utilizar novamente os dados deste exemplo assim como o resultado do modelo de regressão linear paramétrico para mostrar,
escolhendo diversos valores da largura de banda \(h\), a curva de regressão obtida estimativa da regressão polinomial local.
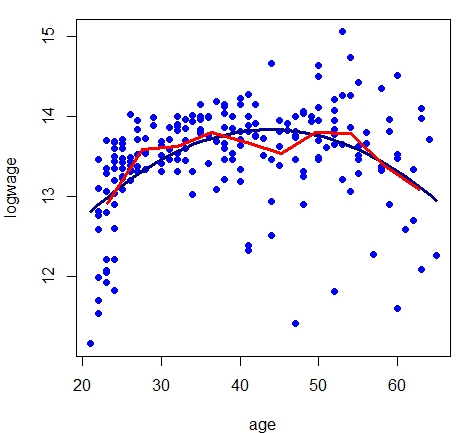
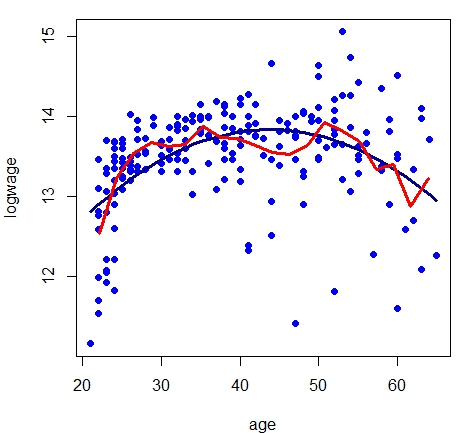
Os dois primeiros gráficos são baseados em pequenas larguras de banda: a esquerda \(h=0.5\) e a direita \(h=1.0\), para isto
utilizamos a opção \(bw\) no comando locpol (Local Polynomial estimation.) no pacote de funções
homônimo.
> library(locpol)
> model.npar01 = locpol(logwage ~ age, data = cps71, kernel = gaussK, bw = 0.5)
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(model.npar01$lpFit[,1], model.npar01$lpFit[,2], col = "red", lwd = 3)
> model.npar02 = locpol(logwage ~ age, data = cps71, kernel = gaussK, bw = 1.0)
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(model.npar02$lpFit[,1], model.npar02$lpFit[,2], col = "red", lwd = 3)
Agora essolhemos as larguras de banda \(h = 5.0\), no gráfico esquerdo, e \(\widehat{h} = 1.49995\) no gráfico direito. Este
valor obtido por validação cruzada. Observemos que, a medida que a largura de banda \(h\) aumenta, a função
estimada passa de áspera demais para suave demais.
 |
 |
> model.npar03 = locpol(logwage ~ age, data = cps71, kernel = gaussK, bw = 5.0)
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(model.npar03$lpFit[,1], model.npar03$lpFit[,2], col = "red", lwd = 3)
> h = regCVBwSelC(cps71$age, cps71$logwage, deg = 1, kernel = gaussK)
> h
[1] 1.49995
> model.npar04 = locpol(logwage ~ age, data = cps71, kernel = gaussK)
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(model.npar04$lpFit[,1], model.npar04$lpFit[,2], col = "red", lwd = 3)
Nos últimos gráficos o da esquerda é baseado numa grande largura de banda \(h=5.0\) e o ajuste é muito suave. O gráfico do canto
direito está correto, é aquele onde a largura de banda foi escolhida por validação cruzada. A função para
obtermos \(\widehat{h}\) é regCVBwSelC. Foi utilizada para mostrar o procedimento mas não é necessário
em situações práticas, é padrão, bastando não dizer nada como em model.npar04.
O gráfico esquerdo também mostra a presença de viés perto dos limites. Como veremos, esta é uma característica
geral da regressão kernel.
O teorema a seguir apresenta o comportamento amostral em amostras grandes do risco do estimador linear local e mostra por que a regressão
linear local é melhor que a regressão kernel.
Teorema IV.5.
Seja \(Y_i=r(X_i)+\sigma(X_i)\epsilon_i\), para \(i=1,\cdots,n\) e \(a\leq X_i \leq b\). Assumamos que \(X_1,\cdots,X_n\) seja uma
amostra aleatória com densidade \(f\) e que
- (i) \(f(x)>0\),
- (ii) \(f\), \(r''\) e \(\sigma^2\) sejam contínuos numa vizinhança de \(x\),
- (iii) \(h_n\to 0\) e \(nh_n\to \infty\).
Seja \(x \, \in \, (a,b)\). Dado \(X_1,\cdots,X_n\) temos o seguinte: o estimador linear local e o estimador kernel ambos têm
variância
\begin{equation}
\frac{\sigma^2(x)}{f(x)nh_n}\int K^2(u)\mbox{d}u \, + \, o_P\Big( \frac{1}{nh_n}\Big) \cdot
\end{equation}
O estimador de kernel Nadaraya - Watson tem viés
\begin{equation}
h_n^2\left( \frac{1}{2}r''(x) \, + \, \frac{r'(x)f'(x)}{f(x)} \right)\int u^2K(u)\mbox{d}u \, + \, o_P( h^2)
\end{equation}
enquanto que o estimador linear local tem um viés assintótico
\begin{equation}
h_n^2\frac{1}{2}r''(x) \int u^2K(u)\mbox{d}u \, + \, o_P( h^2)\cdot
\end{equation}
Demonstração.
Fan (1992) e Fan e Gijbels (1996).▉
Assim, o estimador linear local é livre de viés de projeto, é livre de \(f\). Nos pontos de fronteira \(a\) e \(b\), o estimador kernel de
Nadaraya-Watson tem um viés assintótico de ordem \(h_n\), enquanto o estimador linear local tem viés de ordem \(h_n^2\).
Nesse sentido, a estimativa linear local elimina o viés nos limites.
Sabemos que o procedimento mais adequado, dentre os vistos até agora, é o de polinômios locais. Dediquemos atenção
agora a um detalhe na escolha do parâmetro de alisamento \(h\) por validação cruzada. Dizemos que dentre os gráficos mostrados
no Exemplo IV.5, o último deles a direita é o correto e isso foi afirmado pelo fato de utilizarmos a validação cruzada
para encontrarmos a estimativa do parâmetro de alisamento. Mas, não é bem assim, a seleção por validação
cruzada é um pouco mais complexa, como veremos no próximo exemplo.
Exemplo IV.7.
Queremos entender a dependência entre a estimativa \(\widehat{h}\) da largura de banda e o intervalo onde procurar-la, também
queremos obter o valor do \(R^2\) na regressão local. Para isso vamos explorar mais dois detalhes do procedimento escolhido para
estimarmos a regressão polinomial local.
O gráfico à esquerda dedica-se a pesquisar a relação entre o intervalo onde procurar a largura de banda e o
valor da estimativa desta, ou seja, a estimativa de \(h\). Para isso definimos dois vetores do mesmo comprimento, sup e hn. No primeiro deles
indicaremos o extremo supererior dos intervalos onde procuraremos a estimativa da largura de banda, no segundo guardamos a estimativa da
largura de banda obtida.
> hn = sup = rep(0, 10)
> for(i in 1:10) {sup[i] = 1.5*i}
> for(i in 1:10){
hn[i] = regCVBwSelC(cps71$age, cps71$logwage, deg = 1,
kernel = gaussK, interval = c(0,sup[i]))
}
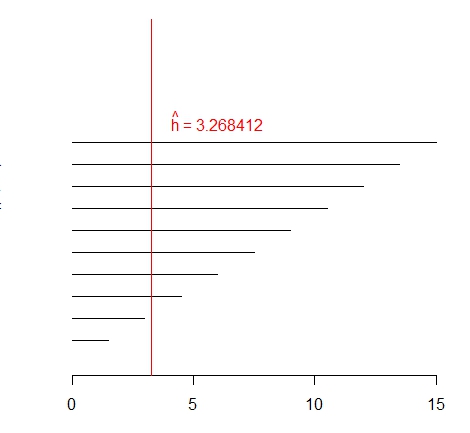
Mostramos os valores escolhidos para os extremos dos intervalos e as estimativas de \(h\) encontradas.
> sup
[1] 1.5 3.0 4.5 6.0 7.5 9.0 10.5 12.0 13.5 15.0
> hn
[1] 1.499950 2.999952 3.268412 3.268412 3.268417 3.268412 3.268411 3.268422 3.268414
[10] 3.268419
Os comandos a seguir permitem-nos obter o gráfico acima a esquerda.
> par(mfrow = c(1,1), mar = c(3, 3, 1, 1))
> plot(seq(0,15), seq(0,15), col = "blue", pch=19, type = "n", axes = FALSE)
> segments(0,1,sup[1],1)
> axis(1)
> for(i in 1:10) segments(0,i,sup[i],i)
> abline(v=hn[3], col= "red")
> text(6,11,expression(paste(hat(h)," = 3.268412")), col="red")
Podemos perceber que, caso não especifiquemos o intervalo de busca, podemos obter uma estimativa de \(h\) que não seja a
correta. Conforme ampliamos o intervalo desta busca percebemos que os primeiros dois valores estimados correspondem ao limite superior, sendo
isto um indicativo que devemos modificar o extremo superior do intervalo de busca. Uma vez feito, encontramos o valor de \(\widehat{h}\) correto,
ou seja, não importa quão mais amplo seja o intervalo de busca que a estimativa encontrada não muda. Encontramos
então o polinômio local mais adequado à nossos dados.
> model.npar05 = locpol(logwage ~ age, data = cps71, kernel = gaussK, bw = hn[3],
xevalLen = length(cps71$age))
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(model.npar05$lpFit[,1], model.npar05$lpFit[,2], col = "red", lwd = 3)
Resolvemos o primeiro problema, como termos certeza de que o valor obtido de \(\widehat{h}\) seja o correto. Queremos agora encontrar o valor
do \(R^2\) nesta situação. Aconte que, por padrão, o comando locpol somente avalia em xevalLen = 100,
ou seja, avalia em no máximo 100 pontos a curva estimada. Isto caso sejam mais do que 100 os valores da variável regressora.
Em nosso exemplo temos um total de
> length(cps71$age)
[1] 205
pontos amostrais. Isso implica que seja necessário informar ao comando
locpol que queremos tantos pontos estimados
quantos pontos amostrais. Para isso utilizamos a opção
xevalLen = length(cps71$age) e, dessa forma, indicamos
que queremos tantas estimativas de \(\widehat{r}\) quantos dados amostrais. Podemos então avaliar na função
R2.
> R2 = function(Y,r){
media = mean(Y)
soma1 = sum((Y-media)^2)
soma2 = sum((r-media)^2)
soma0 = sum((Y-media)*(r-media))
R2 = (soma0^2)/(soma1*soma2)
return(R2)
}
> R2(cps71$logwage,model.npar05$lpFit[,2])
[1] 0.2623865
A função R2 foi criada por nás e tem por entrada os valores de resposta \(Y\) e de estimativas \(\widehat{r}\).
Por resultado temos que \(R^2=0.26\) é o valor do coeficiente de determinação para a regressão polinomial local,
valor ligeiramente superior àquele obtido com o modelo de regressão lineal.
Considere mais uma vez o modelo de regressão
\begin{equation}
Y_i \, = \, r(x_i) \, + \epsilon_i
\end{equation}
e suponha que estimamos \(r\) escolhendo \(\widehat{r}_n(x)\) que minimiza as somas de quadrados
\begin{equation}
\sum_{i=1}^n \big( Y_i - \widehat{r}_n(x_i)\big)^2\cdot
\end{equation}
A minimização de todas as funções lineares, isto é, das funções da forma \(\beta_0 + \beta_1 x\)
produz o estimador de mínimos quadrados. Minimizar todas as funções produz uma função que interpola
os dados. Anteriormente evitamos essas duas soluções extremas, substituindo as somas de quadrados por somas de quadrados
ponderadas localmente. Uma maneira alternativa de obter soluções entre esses extremos é minimizar as somas de quadrados penalizadas
\begin{equation}
M(\lambda) \, = \, \sum_{i=1}^n \big( Y_i - \widehat{r}_n(x_i)\big)^2 \, + \, \lambda J(r),
\end{equation}
onde \(J(r)\) é uma penalidade de aspereza. Adicionar um termo de penalidade ao critério que estamos otimizando é às
vezes chamado de regularização.
Vamos nos concentrar no caso especial
\begin{equation}
J(r) \, = \, \int \big(r''(x) \big)^2\mbox{d}x\cdot
\end{equation}
O parâmetro \(\lambda\) controla a troca entre o ajuste e a penalidade. Vamos denotar por \(\widehat{r}_n\) a função
que minimiza \(M(\lambda)\). Quando \(\lambda = 0\), a solução é a função de interpolação.
Quando \(\lambda \to \infty \), \(\widehat{r}_n\) converge para a linha de mínimos quadrados. O parâmetro \(\lambda\) controla
a quantidade de suavização. Como é a aparência do \(\widehat{r}_n\) para \(0 <\lambda <\infty\)? Para
responder a essa pergunta, precisamos definir splines.
Spline é um polinômio especial por partes, mais detalhes sobre splines podem ser encontrados em Wahba (1990). Os splines
mais utilizadas são splines cúbicos por partes.
Definição IV.6.
Seja \(\xi_1 <\xi_2 < \cdots <\xi_k\) um conjunto de pontos ordenados, chamados nodos, contidos em algum intervalo \((a, b)\).
Um spline cúbico é uma função contínua \(r\) tal que:
- (i) \(r\) é um polinômio cúbico sobre \((\xi_1,\xi_2),(\xi_2,\xi_3),\cdots\) e
- (ii) \(r\) tem primeira e segunda derivadas contínuas nos nós.
Geralmente mais, um spline de ordem \(m\) é um polinômio de grau \(m-1\) por partes com \(m-2\) derivadas contínuas nos
nós. Um spline que é linear além dos nós limítrofes é chamado de spline natural.
Splines cúbicos, ou seja, com \(m = 4\) são os splines mais comuns usados na prática. Eles surgem naturalmente na
estrutura de regressão penalizada, como mostra o seguinte teorema.
Teorema IV.6.
A função \(\widehat{r}_n(x)\) que minimiza
\begin{equation}
M(\lambda) \, = \, \sum_{i=1}^n \big( Y_i - \widehat{r}_n(x_i)\big)^2 \, + \, \lambda \int \big(r''(x) \big)^2\mbox{d}x
\end{equation}
é um spline cúbico natural com nós nos pontos de dados. O estimador \(\widehat{r}_n\) é chamado de spline
de suavização.
Demonstração.
Wahba (1990).▉
O teorema acima não fornece uma forma explícita para \(\widehat{r}_n\). Para fazer isso, vamos construir uma base para o
conjunto de splines.
Teorema IV.7.
Sejam \(\xi_1 <\xi_2 < \cdots <\xi_k\) nós contidos em um intervalo \((a,b)\). Definimos \(h_1(x)=1\), \(h_2(x)=x\),
\(h_3(x)=x^2\), \(h_4(x)=x^3\) e \(h_j(x)=(x-\xi_{j-4})^3_+\) para \(j=5,\cdots,k+4\). As funções \(\{h_1,\cdots,h_{k+4}\}\)
formam uma base para o conjunto de splines cúbicos nesses nós, chamada de base do poder truncado. Assim,
qualquer spline cúbico \(r(x)\) com esses nós pode ser escrito como
\begin{equation}
r(x) \, = \, \sum_{j=1}^{k+4} \beta_j h_j(x)\cdot
\end{equation}
Demonstração.
Wahba (1990).▉
Agora, introduzimos uma base diferente para o conjunto de splines naturais, chamada de base B-spline, que é particularmente
adequada para computação. Estes são definidos da seguinte maneira.
Seja \(\xi_0=a\) e \(\xi_{k+1}=b\). Definimos novos nós \(\tau_1,\cdots,\tau_m\) tais que
\begin{equation}
\tau_1 \leq \tau_2 \leq \tau_3 \leq \cdots \leq \tau_m \leq \xi_0,
\end{equation}
\(\tau_{j+m}=\xi_j\) para \(j=1,\cdots,k\) e
\begin{equation}
\xi_{k+1} \leq \tau_{k+m+1} \leq \cdots \leq \tau_{k+2m}\cdot
\end{equation}
A escolha dos nós extras é arbitrária; geralmente escolhemos \(\tau_1=\cdots=\tau_m=\xi_0\) e \(\xi_{k+1}=\tau_{k+m+1}=\cdots=\tau_{k+2m}\).
Definimos as funções na base recursivamente do seguinte modo. Primeiro definimos
\begin{equation}
B_{i,1}(x)=\left\{ \begin{array}{cc} 1, & \mbox{ caso } \tau_i\leq x < \tau_{i+1} \\
0, & \mbox{ caso contrário}\end{array}\right.,
\end{equation}
para \(i=1,2,\cdots,k+2m-1\). Em seguida, para \(r \leq m\) definimos
\begin{equation}
B_{i,r}(x) \, = \, \displaystyle \frac{x-\tau_i}{\tau_{i+r-1}-\tau_i}B_{i,r-1}(x) \, + \,
\frac{\tau_{i+r}-x}{\tau_{i+r}-\tau_{i+1}}B_{i+1,r-1}(x),
\end{equation}
para \(i = 1,\cdots,k + 2m−r\). Entende-se que, se o denominador é 0, a função é definida como 0.
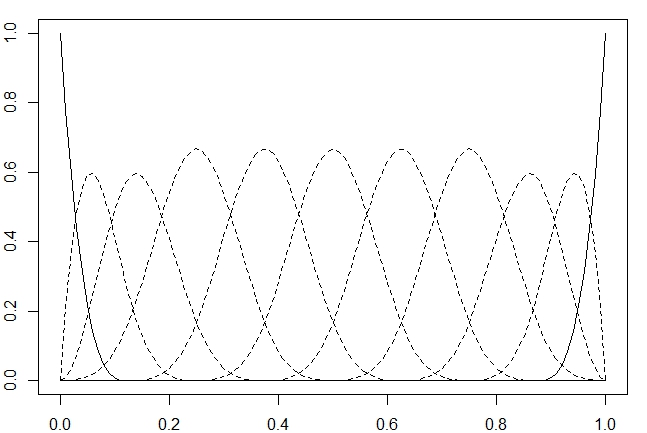 Base cúbica B-spline usando nove nós igualmente espaçados em (0,1).
Base cúbica B-spline usando nove nós igualmente espaçados em (0,1). |
O gráfico acima foi obtido pelos comandos a seguir.
> library(splines)
> x = seq(0,1, by = 0.01)
> curvas = bs(x, knots = seq(0,1,length.out = 9), degree = 3)
> par(mfrow = c(1,1), mar = c(2, 2, 1, 1))
> plot(seq(0,1,length.out = 101), curvas[,1], type = "l", ylim = c(0,1))
> for(i in 2:10) lines(seq(0,1,length.out = 101), curvas[,i], lty = 2)
> lines(seq(0,1,length.out = 101), curvas[,11], lty = 1)
Por padrão, os splines são cúbicos, ou seja, com \(m=4\) ou \(degree = 3\) não sendo necessário especificar.
Teorema IV.8.
As funções \(\{B_{i,4}, \, i = 1,\cdots, k + 4\}\) são uma base para o conjunto de splines cúbicos. Eles
são chamados de funções de base B-spline.
Demonstração.
Hastie et al. (2001).▉
A vantagem das funções de base B-spline é que elas possuem suporte compacto que torna possível acelerar os
cálculos. Veja Hastie et al. (2001) para detalhes. A figura acima mostra a base cúbica B-spline usando nove nós igualmente
espaçados em (0,1).
Estamos agora em condições de descrever o estimador spline em mais detalhes. De acordo com o Teorema IV.6, \(\widehat{r}\) é
um spline cúbico natural. Portanto, podemos escrever
\begin{equation}
\widehat{r}_n(x) \, = \, \sum_{i=1}^N \widehat{\beta}_j B_j(x),
\end{equation}
onde \(B_1,\cdots,B_N\) são uma base para os splines naturais, como os B-splines com \(N = n + 4\). Assim, precisamos apenas encontrar
os coeficientes \(\widehat{\beta}=(\widehat{\beta}_1,\cdots,\widehat{\beta}_N)^\top\). Ao expandir \(r\) na base, podemos agora reescrever
a minimização da seguinte forma:
\begin{equation}
\mbox{minimizar: } \qquad (Y-B\beta)^\top (Y-B\beta) \, + \, \lambda \beta^\top \Omega \beta,
\end{equation}
onde \(B_{i,j}=B_j(X_i)\) e \(\Omega_{jk}=\int B_j''(x)B_k''(x)\mbox{d}x\).
Teorema IV.9.
O valor de \(\beta\) que minimiza \((Y-B\beta)^\top (Y-B\beta) \, + \, \lambda \beta^\top \Omega \beta\) é
\begin{equation}
\widehat{\beta} \, = \, (B^\top B \, + \, \lambda \Omega)^{-1}B^\top Y\cdot
\end{equation}
Demonstração.
Hastie et al. (2001).▉
Deste teorema concluímos que os splines são outro exemplo de suavizadores lineares.
Teorema IV.10.
O spline de suavização \(\widehat{r}_n(x)\) é um suavizador linear, ou seja, existem pesos \(\mathcal{l}(x)\) tais
que \(\widehat{r}_n(x) \, = \, \sum_{i=1}^n Y_i \mathcal{l}_i(x)\). Em particular, a matriz de alisamento \(L\) é
\begin{equation}
L \, = \, B(B^\top B \, + \, \lambda\Omega)^{-1}B^\top,
\end{equation}
e o vetor \(r\) de valores ajustados é dado por
\begin{equation}
r \, = \, LY\cdot
\end{equation}
Demonstração.
Hastie et al. (2001).▉
Se tivéssemos feito uma regressão linear ordinária de \(Y\) em \(B\), a matriz chapéu seria \(L = B(B^\top B)^{-1}B^\top\)
e os valores ajustados interpolariam os dados observados. O efeito do termo \(\lambda\Omega\) é reduzir os coeficientes de regressão
para um subespaço, o que resulta em um ajuste mais suave. Como antes, nós definimos os graus de liberdade efetivos por
\(\nu = \mbox{tr}(L)\) e escolhemos o parâmetro de suavização \(\lambda\) por validação cruzada.
Exemplo IV.8. Novamente utilizamos os dados do Exemplo IV.1 assim como o resultado do modelo de
regressão linear paramétrico para mostrar a curva de regressão não paramétrica obtida por splines. As
funções
smooth.spline e
bs, esta última utilizada anteriormente, estão disponíveis
no pacote
splines.
> model.npar06 = with(cps71, smooth.spline(age, logwage))
> model.npar06
Call:
smooth.spline(x = age, y = logwage)
Smoothing Parameter spar= 0.6265389 lambda= 0.001355428 (11 iterations)
Equivalent Degrees of Freedom (Df): 7.803765
Penalized Criterion (RSS): 8.241849
GCV: 0.2925978
A figura mostra o spline de suavização obtido por validação cruzada para os dados em cps71. O
número efetivo de graus de liberdade é 7.8. O ajuste é tão suave quanto o obtido com o estimador de regressão
local. A diferença entre os dois ajustes é pequena comparada com a largura das bandas de confiança que iremos calcular
mais tarde.
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(cps71$age, fitted.values(model.par), col="darkblue", lwd = 3)
> lines(model.npar06, col = "red", lwd = 3)
Para podermos clacular o valor do \(R^2\) nesta situação procedemos como mostrado a seguir.
> R2(cps71$logwage,fitted(model.npar06))
[1] 0.3290406
Observa-se que o valor do \(R^2=0.33\) é muito maior do que o obtido por outros modelos apresentados.
Consideramos vários métodos para estimar \(\sigma^2\). Para suavizadores lineares, existe uma estimativa simples e quase
isenta de \(\sigma^2\).
Teorema IV.11
Seja \(\widehat{r}_n\) um suavizador linear. Então
\begin{equation}
\widehat{\sigma}^2 \, = \, \frac{\displaystyle\sum_{i=1}^n \Big( Y_i-\widehat{r}_n(x_i)\Big)^2}{n-2\nu+\widetilde{\nu}},
\end{equation}
onde
\begin{equation}
\nu \, = \, \mbox{tr}(L) \qquad \mbox{e} \qquad \widetilde{\nu} \, = \, \mbox{tr}(L^\top L) \, = \, \sum_{i=1}^n ||\mathcal{l}(x_i)||^2\cdot
\end{equation}
Se \(r\) é suficientemente suave, \(\nu = o(n)\) e \(\widetilde{\nu} = o(n)\), então \(\widehat{\sigma}^2\) é um
estimador consistente de \(\sigma^2\).
Demonstração.
Lembremos que se \(Y\) é um vetor aleatório e \(Q\) é uma matriz simétrica, então \(T^\top QY\)
é chamado de forma quadrática e é bem conhecido que
\begin{equation}
\mbox{E}(T^\top QY) \, = \, \mbox{tr}(QV) \, + \, \mu^\top Q\mu,
\end{equation}
onde \(V=\mbox{Var}(Y)\) é a matriz de covariancias de \(Y\) e \(\mu=\mbox{E}(Y)\) é a média do vetor. Agora
\begin{equation}
Y-r \, = \, Y \, - \, LY \, = \, (I-L)Y
\end{equation}
e também
\begin{equation}
\widehat{\sigma}^2 \, = \, \frac{Y^\top \Lambda Y}{\mbox{tr}(\Lambda)},
\end{equation}
onde \(\Lambda=(I-L)^\top (I-L)\). Conseqüentemente
\begin{equation}
\mbox{E}(\widehat{\sigma}^2) \, = \, \frac{\mbox{E}(T^\top \Lambda Y)}{\mbox{tr}(\Lambda)} \, = \, \sigma^2 \, + \,
\frac{r^\top \Lambda r}{n-2\nu+\widetilde{\nu}}\cdot
\end{equation}
Assumindo que \(\nu\) e \(\widehat{\nu}\) não cresçam muito rapidamente e que \(r\) seja suave, o último termo
é pequeno para \(n\) grande e, portanto, \(\mbox{E}(\widehat{\sigma}^2)\approx \sigma^2\). Da mesma forma, pode-se mostrar que
\(\lim_{n\to\infty} \mbox{Var}(\widehat{\sigma}^2)=0\).
▉
Aqui mostramos um outro estimador, devido a Rice (1984). Suponha que os \(x_i\) estejam ordenados. Definimos
\begin{equation}
\widehat{\sigma}^2 \, = \, \frac{1}{2(n-1)}\sum_{i=1}^{n-1} \big( Y_{i+1}-Y_i\big)^2\cdot
\end{equation}
A motivação para este estimador é a seguinte. Assumindo que \(r(x)\) é suave, temos que \(r(x_{i+1})-r(x_i)\approx 0\)
e portanto
\begin{equation}
Y_{i+1}-Y_i \, = \, \big( r(x_{i+1})+\epsilon_{i+1}\big) \, - \, \Big(r(x_i)+\epsilon_i\Big) \, \approx \, \epsilon_{i+1}-\epsilon_i
\end{equation}
e, portanto \(\big( Y_{i+1}-Y_i\big)^2\approx \epsilon_{i+1}^2+\epsilon_i^2-2\epsilon_{i+1}\epsilon_i\). Assim sendo,
\begin{equation}
\begin{array}{rcl}
\mbox{E}\big( Y_{i+1}-Y_i\big)^2 & \approx & \mbox{E}(\epsilon_{i+1}^2) \, + \, \mbox{E}(\epsilon_i^2) \, - \,
2\mbox{E}(\epsilon_{i+1})\mbox{E}(\epsilon_i) \\
& = & \mbox{E}(\epsilon_{i+1}^2) \, + \, \mbox{E}(\epsilon_i^2) \, = \, 2\sigma^2\cdot
\end{array}
\end{equation}
Assim, \(\mbox{E}(\widehat{\sigma}^2)\approx \sigma^2\). Uma variação deste estimador, devido a Gasser et al. (1986) é
\begin{equation}
\widehat{\sigma}^2 = \frac{1}{n-2}\sum_{i=2}^{n-1} c_i^2\delta_i^2,
\end{equation}
onde
\begin{equation}
\begin{array}{ll}
\delta_i \, = \, a_iY_{i-1} \, + \, b_iY_{i+1} \, - \, Y_i, & a_i \, = \, (x_{i+1}-x_i)/(x_{i+1}-x_{i-1}), \\
b_i \, = \, (x_{i}-x_{i-1})/(x_{i+1}-x_{i-1}), & c_i^2 \, = \, (a_i^2 \, + \, b_i^2 \, + \, 1)^{-1}\cdot
\end{array}
\end{equation}
A intuição deste estimador é que é a média dos resíduos que resultam da montagem de uma linha
ao primeiro e terceiro ponto de cada triplo consecutivo de pontos.
Exemplo IV.9.
Vamos utilizar novamente os dados do Exemplo IV.1. Nessa situação avaliamos os diferentes estimadores da variância apresentados até o
momentos. O valor do estimador da variâcia no Teorema IV.11 é saída padrão do comando
locpol. Assim,
podemos observar a estimativa da seguinte forma:
> resumo = summary(model.npar04)
Kernel =
dnorm(x, 0, 1)
n deg bw ase
205 1 1.49995 0.2612706
> resumo$ase
[1] 0.2612706
Para avaliarmos o estimador de Rice (1984) podemos executar os seguintes comandos:
> s2 = sum(diff(cps71$logwage)^2)/(2*(resumo$n-1))
> s2
[1] 0.3233995
O estimador proposto por Gasser et al. (1986) é um pouco mais complexo e nesta situação não pode ser calculado. Isto
acontece porque temos muitos valores iguais na variável explicativa \(cps71$age\).
Até agora assumimos a homocedasticidade, significando que \(\sigma^2= \mbox{Var}(\epsilon_i)\) não varia com \(x\). No Exemplo IV.1
isso é flagrantemente falso. Claramente, \(\sigma^2\) aumenta com \(x\), então os dados são heterocedásticos. A
estimativa da função \(\widehat{r}_n(x)\) é relativamente insensível à heterocedasticidade. No entanto,
quando se trata de fazer bandas de confiança para \(r(x)\), devemos levar em conta a variância não constante.
Vamos assumir a seguinte abordagem. Veja Yu and Jones (2004) e referências para outras abordagens. Suponha que
\begin{equation}
Y_i \, = \, r(x_i) \, + \, \sigma(x_i)\epsilon_i\cdot
\end{equation}
Seja \(Z_i \, = \, \mbox{log}\big(Y_i-r(x_i)\big)^2\) e \(\delta_i \, = \, \mbox{log}(\epsilon_i^2)\). Então,
\begin{equation}
Z_i \, = \, \mbox{log}\big(\sigma^2(x_i)\big) \, + \, \delta_i\cdot
\end{equation}
Isto sugere obter a estimativa de \(\mbox{log}\big(\sigma^2(x)\big)\) pela regressão do logaritmo dos resíduos ao quadrado em
\(x\).
Prosseguimos como segue:
- Estimar \(r(x)\) com qualquer método não paramétrico para obter a estimativa \(\widehat{r}_n(x)\).
- Definir \(Z_i \, = \, \mbox{log}\big(Y_i-\widehat{r}_n(x_i)\big)^2\).
- Obter uma curva de regressão de \(Z\) nos \(x\), novamente usando qualquer método não paramétrico, para
obter uma estimativa \(\widehat{q}(x)\) do \(\mbox{log}\big(\sigma^2(x)\big)\) e calcular
\begin{equation}
\widehat{\sigma}^2(x) \, = \, e^{\widehat{q}(x)}\cdot
\end{equation}
Uma desvantagem dessa abordagem é que o logaritmo de um resíduo muito pequeno será um grande outlier. Uma alternativa
é suavizar diretamente os resíduos quadrados.
Exemplo IV.10.
Utilizaremos os dados do Exemplo IV.1. O objetivo agora é mostrar a curva \(\mbox{log}\big(\sigma^2(x)\big)\) para cada um dos modelos
estudados e utilizados nos dados deste exemplo, ou seja, mostrarmos a curva heterocedástica do logaritmo da variância para os
modelos de regressão não paramétrico de polinômios locais e splines. Procedemos como descrito anteriormente e as
curvas obtidas apresentam-se nos gráficos a seguir.
Em ambos gráficos mantivemos a mesma escala nos eixos, isto com o objetivo de melhor visualizar as diferenças entre as curvas e entre os pontos, que são
o logaritmo dos resíduos ao quadrado. Percebemos que tanto os resíduos quanto as curvas são bem diferentes entre estes
modelos.
> # Polinomio local
> Z = log((cps71$logwage-model.npar05$lpFit[,2])^2)
> hn = regCVBwSelC(cps71$age, Z, deg = 1, kernel = gaussK, interval = c(0,10))
> model.npar05.Z = locpol(Z ~ age, data = cps71, kernel = gaussK, bw = hn,
xevalLen = length(cps71$age))
> sigma05 = exp(model.npar05.Z$lpFit[,2])
> par(mfrow = c(1,1), mar = c(4, 5, 2, 1))
> plot(Z ~ age, data = cps71, col = "blue", pch=19, ylab = "", ylim = c(-18,3),
main = "Polinômios locias")
> mtext(expression(paste("log(",sigma^2,"(x))")), side = 2, adj = 1,
las = 1, at = 3, line = 1)
> lines(cps71$age, model.npar05.Z$lpFit[,2], col="darkblue", lwd = 3)
> # Spline
> Z1 = log((cps71$logwage-fitted(model.npar06))^2)
> model.npar06.Z1 = with(cps71, smooth.spline(age, Z1))
> sigma06 = exp(fitted(model.npar06.Z1))
> par(mfrow = c(1,1), mar = c(4, 5, 2, 1))
> plot(Z1 ~ age, data = cps71, col = "blue", pch=19, ylab = "", ylim = c(-18,3),
main = "Splines")
> mtext(expression(paste("log(",sigma^2,"(x))")), side = 2, adj = 1,
las = 1, at = 3, line = 1)
> lines(cps71$age, fitted(model.npar06.Z1), col="darkblue", lwd = 3)
Com as linhas acima fizemos os gráficos mostrados e ainda obtivemos a variância de cada modelo armazenadas nos objetos
sigma05 e sigma06, respectivamente.
Nesta seção, vamos construir faixas de confiança para \(r(x)\). Normalmente, essas bandas são da forma
\begin{equation}
\widehat{r}_n(x) \, \pm \, c \, \mbox{se}(x),
\end{equation}
onde \(\mbox{se}(x)\) é uma estimativa do desvio padrão de \(\widehat{r}_n(x)\) e \(c> 0\) é alguma constante. Antes
de prosseguirmos, discutimos um problema pernicioso que surge sempre que fazemos o alisamento, ou seja, o problema do viés.
Bandas de confiança não são realmente bandas de confiança para
\(r(x)\), ao contrário, elas são bandas de confiança para \(\widehat{r}_n(x) = \mbox{E}\big(\widehat{r}_n(x)\big)\) que
podemos imaginar como uma versão suavizada de \(r(x)\). Obter um conjunto de confiança para a verdadeira função
\(r(x)\) é complicado por razões que agora explicamos.
Denote a média e o desvio padrão de \(\widehat{r}_n(x)\) por \(\overline{r}_n(x)\) e \(s_n(x)\). Então,
\begin{equation}
\begin{array}{rcl}
\displaystyle\frac{\widehat{r}_n(x)-r(x)}{s_n(x)} & = & \displaystyle\frac{\widehat{r}_n(x)-\overline{r}_n(x)}{s_n(x)} \, + \,
\frac{\overline{r}_n(x)-r(x)}{s_n(x)} \\
& = & Z_n(x) \, + \, \, + \, \displaystyle\frac{\mbox{bias}\big( \widehat{r}_n(x)\big)}
{\sqrt{\mbox{variância}\big( \widehat{r}_n(x)\big)}},
\end{array}
\end{equation}
onde \(Z_n(x)=\big(\widehat{r}_n(x)-\overline{r}_n(x)\big)/s_n(x)\). Tipicamente, o primeiro termo \(Z_n(x)\) converge para uma Normal
padrão do qual derivam as faixas de confiança. O segundo termo é o viés dividido pelo desvio padrão.
Na inferência paramétrica, o viés é geralmente menor que o desvio padrão do estimador, portanto, esse
termo vai para zero à medida que o tamanho da amostra aumenta. Na inferência não paramétrica, vimos que o
alisamento ótimo corresponde ao balanceamento do viés e do desvio padrão. O segundo termo não desaparece mesmo
com amostras grandes.
A presença desse segundo termo não invasivo introduz um viés no limite Normal. O resultado é que o intervalo
de confiança não será centrado em torno da verdadeira função \(r\) devido ao viés de
suavização \(\overline{r}_n(x)-r(x)\).
Existem várias coisas que podemos fazer sobre esse problema. A primeira é: viva com isso. Em outras palavras, basta aceitar
o fato de que a faixa de confiança é para \(\overline{r}_n(x)\) não para \(r\). Não há nada de errado com
isso, contanto que tenhamos cuidado quando reportarmos os resultados para deixar claro que as inferências são para \(\overline{r}_n\)
não \(r\). Uma segunda abordagem é estimar a função de viés \(\overline{r}_n(x) - r(x)\). Isso é
difícil de fazer. De fato, o termo principal do viés é \(r''(x)\) e a estimativa da segunda derivada de \(r\) é muito
mais difícil do que a estimativa de \(r\). Isso requer a introdução de condições de suavidade extras que,
em seguida, colocam em questão o estimador original que não usou essa suavidade extra. Isso tem uma certa circularidade desagradável
para ele. Uma terceira abordagem é a falta de bom senso. Se suavizarmos menos do que a quantidade ideal, a tendência diminuirá
assintoticamente em relação à variação. Infelizmente, não parece haver uma regra prática simples
para escolher a quantidade certa de sub alisamento.Adotaremos a primeira abordagem e nos contentaremos em encontrar uma banda de confiança
para \(\overline{r}_n(x)\).
Assuma que \(\widehat{r}_n(x)\) é um suavizador linear, de modo que
\(\widehat{r}_n(x) = \sum_{i=1}^n \mathcal{l}_i(x)Y_i\). Então,
\begin{equation}
\overline{r}_n(x) \, = \, \mbox{E}\big( \widehat{r}_n(x)\big) \, = \, \sum_{i=1}^n \mathcal{l}_i(x)r(x_i)\cdot
\end{equation}
Por enquanto, vamos assumir que \(\sigma^2(x)=\sigma^2=\mbox{Var}(\epsilon_i)\) seja constante. Então,
\begin{equation}
\mbox{Var}\big(\widehat{r}_n(x)\big) \, = \, \sigma^2 ||\mathcal{l}(x) ||^2\cdot
\end{equation}
Vamos considerar uma banda de confiança para \(\overline{r}_n(x)\) da forma
\begin{equation}
\mbox{I}(x) \, = \, \Big( \widehat{r}_n(x) \, - \, c \widehat{\sigma}||\mathcal{l} ||, \,
\widehat{r}_n(x) \, + \, c \widehat{\sigma}||\mathcal{l} ||\Big),
\end{equation}
para algum \(c>0\) e \(a\leq x\leq b\).
Seguiremos a abordagem em Sun and Loader (1994). Primeiro suponha que \(\sigma\) é conhecido. Então,
\begin{equation}
P\Big( \overline{r}(x) \, \notin \, \mbox{I}(x) \; \mbox{para algum} \; x\in[a,b]\Big) \, = \, \displaystyle
P\left( {\mbox{max}_{x\in [a,b]}} \, \frac{|\widehat{r}_n(x)-\overline{r}_n(x)|}{\sigma||\mathcal{l} ||} > c \right) \, = \\
\qquad \qquad \qquad \qquad \qquad \qquad = \, P\left( {\mbox{max}_{x\in [a,b]}} \, \frac{|\sum_{i=1}^n \epsilon_i\mathcal{l}_i(x)|}{\sigma||\mathcal{l} ||} > c \right)
\, = \, P\left( {\mbox{max}_{x\in [a,b]}} \, |W(x)| > c \right),
\end{equation}
onde \(W(x)=\sum_{i=1}^n Z_i T_i(x)\), \(Z_i=\epsilon_i/\sigma\sim N(0,1)\) e \(T_i(x)=\mathcal{l}_i(x)/||\mathcal{l}(x)||\). Agora, \(W(x)\)
é um processo gaussiano. Para encontrar \(c\), precisamos ser capazes de calcular a distribuição do máximo de
um processo gaussiano. Felizmente, esse é um problema bem estudado. Em particular, Sun and Loader (1994) mostraram que, a chamada de
fórmula tubo, é dada por
\begin{equation}
P\left( \max_x \Big| \sum_{i=1}^n Z_i T_i(x)\Big|> c \right) \, \approx \, 2\big( 1-\Phi(c)\big) \, + \, \frac{\kappa_0}{\pi}e^{-c^2/2},
\end{equation}
para \(c\) grande, onde
\begin{equation}
\kappa_0 \, = \, \int_a^b || \, T'(x) \, ||\mbox{d}x,
\end{equation}
\(T'(x)=(T_1'(x),\cdots,T_n'(x))\) e \(T_i'(x)=\partial T_i(x)/\partial x\). Se escolhermos \(c\) como o valor que resolve a equação
\begin{equation}
2\big( 1-\Phi(c)\big) \, + \, \frac{\kappa_0}{\pi}e^{-c^2/2} \, = \, \alpha,
\end{equation}
então obtemos a banda de confiança simultánea desejada. Caso \(\sigma\) seja desconhecido, usamos uma estimativa \(\widehat{\sigma}\).
Sun and Loader sugerem substituir o lado direito da fórmula tubo com
\begin{equation}
P(|T_m|>c) \, + \, \frac{\kappa_0}{\pi}\left( 1+\frac{c^2}{m}\right)^{-m/2}
\end{equation}
onde \(T_m\) têm distribuição \(t-Student\) com \(m=n-\mbox{tr}(L)\) graus de liberdade. Para \(n\) grande, continua a ser uma
aproximação adequada.
Agora suponhamos que \(\sigma(x)\) seja uma função de \(x\). Então,
\begin{equation}
\mbox{Var}\big( \widehat{r}_n(x)\big) \, = \, \sum_{i=1}^n \sigma^2(x_i)l_i^2(x)\cdot
\end{equation}
Neste caso escolhemos que
\begin{equation}
I(x) \, = \, \widehat{r}_n(x)\pm c \, s(x),
\end{equation}
sendo que
\begin{equation}
s(x) \, = \, \sqrt{\sum_{i=1}^n \widehat{\sigma}^2(x_i)l_i^2(x)},
\end{equation}
onde \(\widehat{\sigma}(x)\) é um estimador de \(\sigma(x)\) e \(c\) é a constante definida acima. Caso \(\widehat{\sigma}(x)\)
varie lentamente com \(x\), então \(\sigma_(x_i)\approx \sigma(x)\) para aqueles \(i\) tais que \(l_i(x)\) é grande e então
\begin{equation}
s(x) \, \approx \, \widehat{\sigma}(x)||l(x)||\cdot
\end{equation}
Assim, uma banda de confiança aproximada é
\begin{equation}
I(x) \, = \, \widehat{r}_n(x) \, \pm \, c \, \widehat{\sigma}(x)||l(x)||\cdot
\end{equation}
Para mais detalhes sobre esses métodos, veja Faraway and Sun (1995). Esta será a banda de confiança que utilizaremos de
preferência.
Exemplo IV.11.
Utilizaremos os dados do Exemplo IV.1. Para o modelo no objeto R
model.npar05 vamos mostrar a variância estimada e a
banda de confiança. Existe uma saída padrão do comando
locpol, mas não gostamos do resultado. Então,
utilizamos nossa própria função. Mostramos o resultado para o modelo ajustado utilizando polinômios locais.
> plot(model.npar05$lpFit[, model.npar05$X], model.npar05$lpFit$var, type = "l",
xlab = model.npar05$X, ylab = "Variância", col = "darkgreen")
> par(mfrow = c(1,1), mar = c(4, 4, 1, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(model.npar05$lpFit[,1], model.npar05$lpFit[,2], col = "red", lwd = 3)
> Intervalo.Conf = function (x)
{
dev <- sqrt(x$CIwidth * x$lpFit$var/x$lpFit$xDen)
points(x$lpFit[, x$X], x$lpFit[, x$Y] + 2 * dev, type = "l", lwd = 2,
col = "darkgreen")
points(x$lpFit[, x$X], x$lpFit[, x$Y] - 2 * dev, type = "l", lwd = 2,
col = "darkgreen")
}
> Intervalo.Conf(model.npar05)
Agora o caso do modelo em model.npar06, nesta situação foram utilizado splines. Vamos investigar uma outra forma
de encontrarmos faixas de confiança para o spline. Desta vez, precisamos fazer o bootstrap, e podemos fazê-lo reamostrando os resíduos
ou reamostrando os todos os dados. Vamos escolher a última abordagem, que pressupõe menos sobre os dados. Precisamos de um simulador.
> simulador = function(dados){
n = nrow(dados)
resample.rows = sample(1:n, size = n, replace = TRUE)
return(dados[resample.rows,])
}
Tratamos assim os pontos no gráfico de dispersão como uma população completa e, em seguida, extraímos uma amostra
deles, com substituição, tão grande quanto o original. Também precisamos de um estimador. O que queremos fazer é
obter um monte de curvas de spline, uma em cada conjunto de dados simulado. Mas, como os valores da variável de entrada mudam de uma
simulação para outra, para tornar tudo comparável, avaliamos cada função spline em uma grade fixa de pontos,
que percorre o intervalo dos dados.
> spline.estimator = function(dados, m=300){
# Ajuste por spline aos dados, com validação cruzada para selecionar lambda
ajuste = smooth.spline(x=dados[,1], y=dados[,2], cv=TRUE)
# Configurando uma grade de pontos com espaçamento uniforme para avaliar o spline
eval.grid = seq(from=min(dados[,1]), to=max(dados[,1]), length.out=m)
# Um pouco ineficiente para redefinir a mesma grade toda vez que chamamos isso,
# mas não uma grande sobrecarga
# Fazemos a previsão e retornamos os valores previstos
return(predict(ajuste, x=eval.grid)$y) # Somente queremos os valores previstos
}
Isso define o número de pontos de avaliação como 300, que é grande o suficiente para dar curvas visualmente suaves,
mas não tão grandes a ponto de serem computacionalmente incômodas. Agora juntemo-os para obter bandas de confiança.
> spline.cis = function(dados, B, alpha, m=300) {
spline.main = spline.estimator(dados, m=m)
# Desenhe B amostras de bootstrap, ajustemos o spline para cada
spline.boots = replicate(B, spline.estimator(simulador(dados),m=m))
# O resultado tem m linhas e B colunas
cis.lower = 2*spline.main - apply(spline.boots,1,quantile,probs=1-alpha/2)
cis.upper = 2*spline.main - apply(spline.boots,1,quantile,probs=alpha/2)
return(list(main.curve = spline.main,lower.ci=cis.lower,upper.ci=cis.upper,
x=seq(from=min(dados[,1]),to=max(dados[,1]),length.out=m)))
}
O valor de retorno aqui é uma lista que inclui a curva ajustada original, os limites de confiança inferior e superior e os pontos
nos quais todas as funções foram avaliadas.
Exemplo IV.12. Continuando o Exemplo IV.11, mostramos agora o rssultado do ajuste utilizando spline.
> dados = data.frame(age = cps71$age, logwaget = cps71$logwage)
> head(cps71)
logwage age
1 11.1563 21
2 12.8131 22
3 13.0960 22
4 11.6952 22
5 11.5327 22
6 12.7657 22
> head(dados)
age logwaget
1 21 11.1563
2 22 12.8131
3 22 13.0960
4 22 11.6952
5 22 11.5327
6 22 12.7657
Construímos a nova base de dados dados porque nas funções spline.estimaotr e spline.cis
assumimos a primeira coluna como x e a segunda coluna da base dados como y. Observe que na base de dados original
estas variáveis estavam trocadas de posição.
> dados.cis = spline.cis(dados, B=1000, alpha=0.05)
> par(mfrow = c(1,1), mar = c(4, 5, 2, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(model.npar06, col = "red", lwd = 3)
> lines(x=dados.cis$x, y=dados.cis$lower.ci, lwd = 2, col = "darkgreen")
> lines(x=dados.cis$x, y=dados.cis$upper.ci, lwd = 2, col = "darkgreen")
Na Figura acima mostramos dois gráficos, à esquerda os limites de confiança de 95% resultantes, com base nas B = 1000
replicações bootstrap. Estas bandas são claramente assimétricos da mesma forma que a curva se ajusta a todos os
dados, mas perceba como eles são largas e como eles se ampliam à medida que vamos do centro dos dados em qualquer direção.
No caso do gráfico à direita utilizamos o resultado das bandas de confiança mostradas nesta seção e utilizamos
o resultado guardado em sigma06, para isso utilizamos os comandos listados abaixo.
> norma = sum(model.npar06$lev^2)
> par(mfrow = c(1,1), mar = c(4, 5, 2, 1))
> plot(logwage ~ age, data = cps71, col = "blue", pch=19)
> lines(model.npar06, col = "red", lwd = 3)
> lines(model.npar06$x, model.npar06$y +
2*sqrt(sigma06[model.npar06$x])*norma, lwd = 2, col = "darkgreen")
> lines(model.npar06$x, model.npar06$y -
2*sqrt(sigma06[model.npar06$x])*norma, lwd = 2, col = "darkgreen")
Pode-se argumentar que exigir que as bandas de confiança cubram a função em todos os \(x\) é muito rigoroso.
Wahba (1983), Nychka (1988) e Cummins et al. (2001) introduziram um tipo diferente de cobertura a que nos referimos como cobertura média.
Aqui vamos discutir um método para construir bandas de cobertura média com base na ideia em Juditsky e Lambert-Lacroix (2003).
Suponha que estamos estimando \(r(x)\) no intervalo \([0,1]\). Defina a cobertura média de uma banda \((\mathcal{l}, u)\) por
\begin{equation}
\mathcal{C} \, = \, \int_0^1 P\big( r(x) \in [\mathcal{l}(x),u(x)]\big)\mbox{d}x\cdot
\end{equation}
Vamos construir bolas de confiança para \(r\), os quais são conjuntos \(\mathcal{B}_n(\alpha)\), da forma
\begin{equation}
\mathcal{B}_n(\alpha) \, = \, \big\{ r \, : \, ||\widehat{r}_n \, - \, r || \, \leq \, s_n(\alpha)\big\},
\end{equation}
tais que
\begin{equation}
P\big( r \, \in \, \mathcal{B}_n(\alpha)\big) \, \geq \, 1-\alpha\cdot
\end{equation}
Dada uma bola de confiança, sejam
\begin{equation}
\displaystyle \mathcal{l}(x) \, = \, \widehat{r}_n(x) \, - \, s_n(\alpha/2)\sqrt{\frac{2}{\alpha}}, \qquad
\displaystyle u(x) \, = \, \widehat{r}_n(x) \, + \, s_n(\alpha/2)\sqrt{\frac{2}{\alpha}}\cdot
\end{equation}
Nós agora vamos mostrar que essas bandas têm uma cobertura média de pelo menos \(1 - \alpha\). Primeiro, observe que
\(\mathcal{C} = P\big(r(U)\in [\mathcal{l}(U), u(U)]\big)\) onde \(U\sim U(0,1)\) é independente dos dados. Seja \(A\) o evento
que \(r \in \mathcal{B}_n(\alpha/2)\). No evento \(A\), \(||\widehat{r}_n \, - \, r || \, \leq \, s_n(\alpha)\). Escrevendo \(s_n\) para
\(s_n(\alpha/2)\) temos,
\begin{equation}
\begin{array}{rcl}
1 - \mathcal{C} & = & P\Big( r(U) \, \notin [\mathcal{l}(U), u(U))]\Big) \, = \, P\Big( |\widehat{r}_n(U) - r(U)| \, > \, s_n\sqrt{\frac{2}{\alpha}}\Big) \\
& = & P\Big( |\widehat{r}_n(U) - r(U)| \, > \, s_n\sqrt{\frac{2}{\alpha}}, \, A \Big) \, + \,
P\Big( |\widehat{r}_n(U) - r(U)| \, > \, s_n\sqrt{\frac{2}{\alpha}}, \, A^c \Big) \\
& \leq & P\Big( |\widehat{r}_n(U) - r(U)| \, > \, s_n\sqrt{\frac{2}{\alpha}}, \, A \Big) \, + \, P(A^c) \\
& \leq & \displaystyle\frac{\mbox{E}\big( \mbox{I}_A||\widehat{r}_n \, - \, r ||^2 \big)}{\displaystyle s_n^2\frac{2}{\alpha}} \, + \,
\frac{\alpha}{2} \, \leq \, \frac{s_n^2}{\displaystyle s_n^2\frac{2}{\alpha}} \, + \, \frac{\alpha}{2} \, \leq \, \alpha\cdot
\end{array}
\end{equation}
Suponhamos agora que a covariável seja de dimensão \(d\), ou seja,
\begin{equation}
x_i \, = \, (x_{i1},x_{i2},\cdots,x_{id} )^\top\cdot
\end{equation}
O modelo de regressão assume a forma
\begin{equation}
Y \, = \, r(x_{1},x_{2},\cdots,x_{d} ) \, + \, \epsilon\cdot
\end{equation}
Em princípio, todos os métodos que discutimos passam facilmente para este caso. Infelizmente, o risco de um estimador de regressão
não paramétrico aumenta rapidamente com a dimensão \(d\). Em um problema unidimensional, a taxa ótima de convergência
de um estimador não paramétrico é \(n^{−4/5}\) se \(r\) é assumido como tendo uma segunda derivada integrável.
Em \(d\) dimensões, a taxa ótima de convergência é \(n^{−4/(4 + d)}\). Assim, o tamanho da amostra \(m\) requerido para
um problema \(d\)-dimensional ter a mesma precisão que um tamanho de amostra \(n\) em um problema unidimensional é \(m \propto n^{cd}\)
onde \(c = (4 + d) / (5d)> 0\). Isto implica que para manter um determinado grau de precisão de um estimador, o tamanho da amostra deve aumentar
exponencialmente com a dimensão \(d\). Em outras palavras, as bandas de confiança ficam muito grandes à medida que a dimensão
\(d\) aumenta. No entanto, vamos continuar e ver como podemos estimar a função de regressão.
Considere a regressão linear local. A função kernel \(K\) é agora uma função de \(d\) variáveis.
Dada uma matriz \(d \times d\) de largura de banda definida positiva não-singular \(H\), definimos
\begin{equation}
K_H \, = \, \frac{1}{|H|^{1/2}}K\big( H^{1/2}x\big)\cdot
\end{equation}
Muitas vezes, a escala de cada covariada tem a mesma média e variância e então usamos o kernel
\begin{equation}
h^{-k}K\big(||x||/h \big),
\end{equation}
onde \(K\) é qualquer kernel unidimensional. Então há um único parâmetro de largura de banda \(h\). Num
valor alvo \(x = (x_1,\cdots, x_d)^\top\) a soma dos quadrados local é dada por
\begin{equation}
\sum_{i=1}^n \omega_i(x)\Big( Y_i \, - \, a_0 \sum_{j=1}^d a_j (x_{ij}-x_j)\Big)^2
\end{equation}
onde
\begin{equation}
\omega_i(x) \, = \, K(||x_i-x||/h)\cdot
\end{equation}
O estimador é
\begin{equation}
\widehat{r}_n(x) \, = \, \widehat{a}_0,
\end{equation}
onde \(\widehat{a}=(\widehat{a}_0,\cdots,\widehat{a}_d)^\top\) é o valor de \(a=(a_0,\cdots,a_d)^\top\) que minimiza a soma de
quadrados ponderada. A solução \(\widehat{a}\) é
\begin{equation}
\widehat{a} \, = \, (X_x^\top W_xX_x)^{-1}X_x^\top W_xY
\end{equation}
onde
\begin{equation}
X_x \, = \, \begin{pmatrix} 1 & x_{11}-x_1 & \cdots & x_{1d}-x_d \\ 1 & x_{21}-x_1 & \cdots & x_{2d}-x_d \\
\vdots & \vdots & \ddots & \vdots \\ 1 & x_{n1}-x_1 & \cdots & x_{nd}-x_d \end{pmatrix}
\end{equation}
e \(W_x\) é a matriz diagonal cujo elemento \((i, i)\) é \(w_i(x)\).
As propriedades teóricas da regressão polinomial local em dimensões maiores são discutidas no seguinte teorema.
Teorema IV.12.
Seja \(\widehat{r}_n(x)\) o estimador linear local multivariado com matriz de largura de banda \(H\) e assumimos satisfeitas as condições
de regularidade:
- (a) O kernel \(K\) é limitado, de suporte compacto de tal modo que \(\int u u^\top K(u)\mbox{d}u=\mu_2(K)\mbox{I}\), onde
\(\mu_2(K)\neq 0\) é escalar e \(\mbox{I}\) é matriz identidade \(d \times d\). Além disso, todos os momentos de
ordem ímpar de \(K\) somem, isto é, \(\int u_1^{l_1}\cdots u_d^{l_d}K(u)\mbox{d}u=0\) para todos os inteiros não
negativos \(l_1,\cdots,l_d\), de tal forma que sua soma é ímpar. Esta úútima condição é
satisfeita por kernels esféricos simétricos e kernels de produtos baseados em kernels univariados simétricos.
- (b) O ponto \(x\) está no suporte de \(f\). Em \(x\), \(\nu\) é contínua, \(f\) é continuamente diferenciável
e todas as derivadas de segunda ordem de \(r\) são contínuas. Além disso, \(f(x)> 0\) e \(\nu(x)> 0\).
- (c) A sequência de matrizes de largura de banda \(H^{1/2}\) é tal que \(n^{-1}|H|\) e cada entrada de \(H\) tende a
zero quando \(n\to\infty\) com \(H\) permanecendo simétrica e definida positiva. Além disso, existe uma constante fixa \(L\)
tal que a razão de seu maior e menor autovalor é no máximo \(L\) para todo \(n\).
Suponha que \(x\) seja um ponto não-fronteira. Condicionado em \(X_1,\cdots,X_n\) temos os seguintes resultados:
- (i) O viés de \(\widehat{r}_n(x)\) é
\begin{equation}
\frac{1}{2}\mu_2(K)\mbox{tr}\big( H\mathcal{H}\big)+o_P(\mbox{tr}(H)),
\end{equation}
onde \(\mathcal{H}\) é a matriz das segundas derivadas parciais de \(r\) avaliada em \(x\) e \(\mu_2(K)\) é o escalar
definido pela condição de regularidade (a).
- (ii) A variância de \(\widehat{r}_n(x)\) é
\begin{equation}
\frac{\sigma^2(x)\int K(u)^2\mbox{d}u}{n|H|^{1/2}f(x)}\big( 1+o_P(1)\big)\cdot
\end{equation}
Além disso, o viés no limite é da mesma ordem que no interior, ou seja, \(O_P(\mbox{tr}(H))\).
Demonstração.
Ruppert and Wand (1994).▉
Ao estudarmos a regressão local conhecemos duas formas de avaliarmos estes estimadores: o estimador kernel Nadaraya–Watson e os polinômios locais. No
Teorema IV.5 mostramos que a regressão linear local é melhor que a regressão kernel. Acontece que, pelo menos até o nosso conhecimento, os
procedimentos implementados no R somente permitem a estimação do modelo de regressão por polinômios locais até
ordem 2, ou seja, somente aceitam no máximo duas covariáveis contínuas. Nos referimos especificamente ao pacote de funções
locpol. Significa que, para aplicarmos modelos de regressão não paramétrica a situações mais complexas
devemos recorrer ao estimador kernel, muito bem implementado no pacote de funções np e descrito no artigo de Hayfield and Racine (2008).
O pacote np implementa uma variedade de estimadores não paramétricos e semiparamétricos baseados no estimador kernel Nadaraya–Watson
Existem também procedimentos para testes de significância não paramétricos e testes consistentes de especificação de
modelo. Este pacote foca nos métodos apropriados para a combinação de dados contínuos, discretos e categóricos, frequentemente encontrados
em problemas aplicados. Os métodos de seleção de largura de banda orientados por dados são enfatizados, embora tenhamos cautela
já que estes procedimentos podem ser exigentes em termos computacionais.
Exemplo IV.13.
Dados britânicos de corte transversal, consistindo de uma amostra aleatória extraída do Inquérito às Famílias da Família Britânica de 1995. Os agregados familiares consistem em casais casados com um chefe de família empregado entre os 25 e os 55 anos de idade. Existem 1655 observações ao nível do agregado familiar no total.
> library(np)
> data(Engel95)
> print(head(Engel95), digits = 4)
food catering alcohol fuel motor fares leisure logexp logwages nkids
1 0.14949 0.10460 0.00000 0.07555 0.1940 0.03446 0.16236 4.878 5.533 0
2 0.36461 0.03262 0.01533 0.09762 0.1994 0.03679 0.13521 5.094 5.371 0
3 0.21042 0.06525 0.07919 0.03367 0.2526 0.01002 0.17814 5.782 6.001 0
4 0.07869 0.11527 0.07014 0.05842 0.0000 0.24974 0.02726 5.756 5.861 0
5 0.28244 0.05508 0.07505 0.15707 0.2178 0.00000 0.03754 5.280 6.569 0
6 0.16636 0.15928 0.17427 0.02050 0.0907 0.00000 0.14901 5.822 5.879 0
Esta aqui é uma ilustração simples para ajudá-lo a começar com a regressão do Kernel multivariada
e a plotagem através da função de plotagem do R que chama npplot, no mesmo pacote np.
> Engel95 = Engel95[order(Engel95$logexp),]
> attach(Engel95)
> modelo.iv = npregiv(y=food, z=logexp, w=logwages, method="Landweber-Fridman")
> phihat = modelo.iv$phi
Calculando a regressão IV (ou seja, regressão de y em z)
> ghat <- npreg(food~logexp, regtype="ll")
Para os gráficos, restrinjimos a atenção à maior parte dos dados, isto é, para a área de plotagem,
cortamos 1/4 de um por cento de cada cauda de y em z.
> trim <- 0.0025
> plot(logexp,food,
ylab="Compartilhamento Orçamentário de Alimentos",
xlab="log(Despesa total)",
xlim=quantile(logexp,c(trim,1-trim)),
ylim=quantile(food,c(trim,1-trim)),
main="Regressão Não Paramétrica Kernel Instrumental",
type="p",
cex=.5,
col="lightgrey")
> lines(logexp,phihat,col="blue",lwd=2,lty=2)
> lines(logexp,fitted(ghat),col="red",lwd=2,lty=4)
> legend(quantile(logexp,trim),quantile(food,1-trim),
c(expression(paste("Não Paramétrica IV: ",hat(varphi)(logexp))),
"Regressão Não Paramétrica : E(food | logexp)"),
lty=c(2,4),
col=c("blue","red"),
lwd=c(2,2))
Assim, vemos que em dimensões mais altas, a regressão linear local ainda evita excessivo viés de limite e viés de design.
Interpretar e visualizar um ajuste de alta dimensão é difícil. À medida que o número de covariáveis aumenta,
a carga computacional torna-se proibitiva. Ás vezes, uma abordagem mais frutífera é usar um modelo aditivo. Um modelo
aditivo é um modelo da forma
\begin{equation}
Y \, = \, \mu \, + \, \sum_{j=1}^d r_j(x_i) \, + \, \epsilon,
\end{equation}
onde \(r_1,\cdots,r_d\) são funções suaves. Acontece que este modelo não é identificável, pois podemos
adicionar qualquer constante a \(\mu\) e subtrair a mesma constante de um dos \(r_j\) sem alterar a funçção de regressão. Este
problema pode ser corrigido de várias maneiras, talvez o mais fácil seja definir \(\widehat{\mu}=\overline{Y}\) e, em seguida, considerar
os \(r_j\) como desvios de \(\overline{Y}\). Neste caso, exigimos que
\begin{equation}
\sum_{i=1}^n r_j(x_i) \, = \, 0,
\end{equation}
para cada \(j\).
O modelo aditivo claramente não é tão geral quanto estimar \(r(x_1,\cdots, x_d)\), mas é muito mais simples de ser
computado e interpretado e, portanto, é geralmente um bom ponto de partida. Apresentamos um algoritmo simples para transformar
qualquer regressão unidimensional mais suave em um método para ajustar modelos aditivos, chamado de backfitting ou adaptação.
ALGORITMO DE ADAPTAÇÃO
- Passo 1: Inicialização: seja \(\widehat{\mu}=\overline{Y}\), e considere valores inciais para \(\widehat{r}_1,\cdots,\widehat{r}_d\).
- Pssso 2: Iterar até a convergência: para \(j=1,\cdots,d\)
- Calcular
\begin{equation}
\widetilde{Y}_i \, = \, Y_i - \widehat{\mu} \, - \, \sum_{k\neq j} r_k(x_i),
\end{equation}
para \(i=1,\cdots,n\).
- Aplicar o alisamento a \(\widetilde{Y}_i\) no \(x_j\) para obter \(\widehat{r}_j\).
- Atribuir \(\widehat{r}_j\) igual a
\begin{equation}
\widehat{r}_j(x) - \frac{1}{n}\sum_{i=1}^n \widehat{r}_j(x_i)\cdot
\end{equation}
Uma forma de implementar este algoritmo está disponível para modelos de regressão linear múltipla aplicando splines a
somente uma covarável, isso não significa que poderemos aplicar splines a somente uma covariálvel por vez. Significa que
aplicaremos splines undimensionais a uma ou várias covariáveis isoladamente. Veja no seguinte exemplo a forma de utilizarmos o
comando ns dentro do pacote de funções splines..
Exemplo IV.14.
Os dados em mtcars, disponíveis na base do R, foram extraídos da revista Motor Trend nos Estados Unidos de 1974
e compreendem o consumo de combustível e 10 aspectos do projeto e desempenho de 32 automóveis modelos de 1973 a 1974.
Interéssa-nos como reposta mpg ou milhas/galão em dólares americanos, como covariáveis temos gear ou a engrenagem contando o número
de marchas para a frente, a qual é discreta ou um fator; wt o peso em 1000 libras e hp a potência bruta do motor.
> library(splines)
> mult.spline1 = lm(mpg ~ factor(gear) + ns(wt) + hp, data = mtcars)
> summary(mult.spline1)
Call:
lm(formula = mpg ~ factor(gear) + ns(wt) + hp, data = mtcars)
Residuals:
Min 1Q Median 3Q Max
-3.3025 -1.9307 -0.3722 1.0243 5.9784
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 29.97256 1.84066 16.284 1.74e-15 ***
factor(gear)4 1.26490 1.34084 0.943 0.3539
factor(gear)5 1.87356 1.86662 1.004 0.3244
ns(wt) -15.79711 4.28188 -3.689 0.0010 **
hp -0.03497 0.01260 -2.775 0.0099 **
---
Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Residual standard error: 2.619 on 27 degrees of freedom
Multiple R-squared: 0.8356, Adjusted R-squared: 0.8112
F-statistic: 34.3 on 4 and 27 DF, p-value: 3.196e-10
Nesta abordagem precisamos definir splines em dimensões maiores. Para \(d = 2\), minimizamos
\begin{equation}
\sum_i \big( Y_i \, - \, \widehat{r}_n(x_{i1},x_{i2})\big)^2 \, + \, \lambda \, J(r),
\end{equation}
onde
\begin{equation}
J(r) \, = \, \int\int\left[ \left(\frac{\partial^2 r(x)}{\partial x_1^2}\right) \, + \,
2\left(\frac{\partial^2 r(x)}{\partial x_1\partial x_2}\right) \, + \,
\left(\frac{\partial^2 r(x)}{\partial x_2^2}\right)\right] \mbox{d}x_i\mbox{d}x_2\cdot
\end{equation}
O minimizedor \(\widehat{r}_n\) é chamado spline de placa fina. É difícil descrever e ainda mais difícil, mas
certamente não impossível, de ajustar. Veja Green and Silverman (1994) para mais detalhes.
Exemplo IV.15.(Continuação do Exemplo IV.14)
Utilizando os mesmos dados, podemos considerar interações entre as variáveis wt e hp, agora
do tipo contínuas e aplicados aplines undimensionais a cada uma separadamente.
> library(splines)
> mult.spline2 = lm(mpg ~ factor(gear) + ns(wt)*ns(hp), data = mtcars)
> summary(mult.spline2)
Call:
lm(formula = mpg ~ factor(gear) + ns(wt) * ns(hp), data = mtcars)
Residuals:
Min 1Q Median 3Q Max
-2.7324 -1.7140 -0.5176 1.4920 4.5603
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 32.103 1.758 18.266 2.36e-16 ***
factor(gear)4 0.829 1.118 0.741 0.46505
factor(gear)5 1.816 1.548 1.174 0.25114
ns(wt) -29.871 5.245 -5.695 5.43e-06 ***
ns(hp) -28.974 5.867 -4.938 3.95e-05 ***
ns(wt):ns(hp) 47.236 12.961 3.645 0.00117 **
---
Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Residual standard error: 2.171 on 26 degrees of freedom
Multiple R-squared: 0.8912, Adjusted R-squared: 0.8702
F-statistic: 42.58 on 5 and 26 DF, p-value: 1.035e-11
Ou podemos utilizar o comando s no pacote mgcv com o qual podemos ajutar splines bidimensionais.
> library(mgcv)
> mult.spline2 = gam(mpg ~ factor(gear) + s(wt,hp), data = mtcars)
> summary(mult.spline2)
Family: gaussian
Link function: identity
Formula:
mpg ~ factor(gear) + s(wt, hp)
Parametric coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 19.6247 0.7288 26.926 <2e-16 ***
factor(gear)4 0.4072 1.2821 0.318 0.754
factor(gear)5 2.0046 1.6312 1.229 0.231
---
Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Approximate significance of smooth terms:
edf Ref.df F p-value
s(wt,hp) 5.059 6.299 16.79 4.79e-10 ***
---
Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
R-sq.(adj) = 0.868 Deviance explained = 89.8%
GCV = 6.4313 Scale est. = 4.8116 n = 32
Perceba que, desta última forma, tivemos um ganho real no ajuste, o \(R^2\) ajustado é de 0.898. Lembremos que estamos trabalhando com
modelos de regressão, com isso a melhor maneirra de descubrirmos se estamos realizaddo um ajuste adequado é analisando os resíduos.
Para isso, qualquer seja o modelos escolhido, sempre é possível utilizarmos o comando residuals e mostrar gráficos
e testes adequados.
Vamos supor que o vetor de variáveis explicativas \(X = (x_1,\cdots, x_p)\) seja de alta dimensão. O modelo aditivo
\begin{equation}
Y = \mu + \sum_{j=1}^p f_j(x_j) + \epsilon
\end{equation}
pode ser muito flexível, pois permite alguns graus de liberdade por cada covariável, mas não cobre o efeito de
interações entre as variáveis independentes, explicativas ou covariáveis. A regressão por prospeção de projeção,
proposto por Friedman and Stuetzle (1981), aplica um modelo aditivo às variáveis projetadas. A ideia é aproximar a função de regressão
\(r(x_1,x_2,\cdots,x_p)\) com uma função da forma
\begin{equation}
\mu+\sum_{m=1}^M r_m(z_m),
\end{equation}
onde
\begin{equation}
z_m \, = \, \alpha_m^\top X
\end{equation}
e cada \(\alpha_m\) é um vetor unitário, ou seja, de comprimento um, para \(m = 1,\cdots,M\).
Assim, ele usa um modelo aditivo nas variáveis preditoras que são formadas projetando \(X\) em \(M\) direções cuidadosamente
escolhidas. Mesmo sendo \(M\) muito grande tais modelos podem aproximar, uniformemente em conjuntos compactos e em muitos outros sentidos,
funções contínuas arbitrárias de \(X\). Os termos \(r_m(z_m)\) são chamados de funções de crista,
uma vez que são constantes em todas as direções, exceto uma.
Note que cada \(z_m\) é a
projeção de \(X\) num subespaço. O vetor de direção \(\alpha\) é escolhido em cada etapa para
minimizar a fração de variância inexplicada. Em mais detalhes, denotemos por \(S(\cdot)\) o mapeamento que produz \(n\)
valores ajustados de algun método de alisamento, dados os \(Y_i\) e alguns valores das covariáveis unidimensionais \(z_1,\cdots, z_n\).
Seja também \(\widehat{μ} = \overline{Y}\) e substitua \(Y_i\) por \(Y_i - \overline{Y}\). Assim, os \(Y_i\) agora têm média 0.
Da mesma forma, modificamos as covariáveis para que cada uma tenha a mesma variância. Então siga os seguintes passos:
- Passo 1: Inicialize os resíduos \(\widehat{\epsilon}_i=Y_i\), \(i=1,\cdots,n\) e seja \(m=0\).
- Pssso 2: Encontrar a direção, vetor unitário, \(\alpha\) que maximiza
\begin{equation}
I(\alpha) \, = \, 1-\frac{\displaystyle \sum_{i=1} ^n \big( \widehat{\epsilon}_i-S(\alpha^\top x_i)\big)^2}{\displaystyle\sum_{i=1}^n \widehat{\epsilon}_i^2},
\end{equation}
e seja \(z_{mi}=\alpha^\top x_i\), \(\widehat{r}_m(z_{mi})=S(z_{mi})\).
- Pssso 3: Defina \(m = m + 1\) e atualize os resíduos:
\begin{equation}
\widehat{\epsilon}_i - \widehat{r}_m(z_{mi}) \, \to \, \widehat{\epsilon}_i\cdot
\end{equation}
Se \(m=M\) paramos, caso contrário, voltamos para o Passo 2.
Exemplo IV.16.
A função
ppr (Projection Pursuit Regression) ajusta \(\mu+\sum_{m=1}^M r_m(\alpha_m^\top X)\) por mínimos quadrados e restringe os vetores
\(\alpha_m\) a serem de comprimento unitário. Primeiramente, ajusta os termos \(M_{max}\) (max.terms) sequencialmente, depois remove de
volta a \(M\) (nterms) em cada estágio, eliminando o termo menos eficiente e o reajusta. A função retorna a proporção
da variância explicada por todos os ajustes de \(M,\cdots,M_{max}\).
> library(np)
> data(wage1)
> modelo.ppr1 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 2, max.terms = 5)
> R2(wage1$lwage, fitted.values(modelo.ppr1))
[1] 0.447875
> modelo.ppr2 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 2, max.terms = 6)
> R2(wage1$lwage, fitted.values(modelo.ppr2))
[1] 0.45218
> modelo.ppr3 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 2, max.terms = 7)
> R2(wage1$lwage, fitted.values(modelo.ppr3))
[1] 0.4691726
> modelo.ppr4 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 2, max.terms = 8)
> R2(wage1$lwage, fitted.values(modelo.ppr4))
[1] 0.4697552
> modelo.ppr5 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 2, max.terms = 9)
> R2(wage1$lwage, fitted.values(modelo.ppr5))
[1] 0.46254
O maior valor de \(R^2\) foi encontrado com o modelo no objeto
modelo.ppr4. Mostramos o resultado.
> summary(modelo.ppr4)
Call:
ppr(formula = lwage ~ female + educ + exper, data = wage1, nterms = 2,
max.terms = 8)
Goodness of fit:
2 terms 3 terms 4 terms 5 terms 6 terms 7 terms 8 terms
78.65109 82.16414 71.81014 73.06259 70.76169 70.57399 72.15356
Projection direction vectors ('alpha'):
term 1 term 2
femaleFemale -0.96783665 -0.58241848
femaleMale -0.25074206 -0.80764297
educ -0.01054856 0.08969389
exper -0.01758883 0.02136698
Coefficients of ridge terms ('beta'):
term 1 term 2
0.3836857 0.3625912
As informações adicionadas são os vetores de direção \(\alpha_m\) e os coeficientes \(\beta_{im}\) em
\begin{equation}
Y_i \, = \, \mu_{i} \, + \, \sum_{m=1}^M \beta_{im}r_m(\alpha_m^\top X) \, + \, \epsilon\cdot
\end{equation}
Note que esta é uma extensão do modelo de regressão por prospeção de projeção para múltiplas
respostas e, então, separamos os escalonamentos das funções suaves \(r_m\), que são escalonadas para ter média
zero e variância unitária sobre as projeções do conjunto de dados.
O algoritmo primeiro acrescenta os \(M_{max}\) termos (max.terms) um de cada vez; ele usará menos se não conseguir encontrar um
termo para adicionar que faça diferença suficiente. Em seguida, ele remove o termo menos importante em cada etapa até que
os \(M\) (nterms) termos sejam deixados.
Podemos perceber que o valor de \(M\) é arbitrário, por isso acompanhamos o ajuste de cada modelo com o valor correspondente do valor
do \(R^2\). Por isso escolhemos o modelo em modelo.ppr4, mas percebemos que o maior valor de variância explicada acontece
quando a quantidade de termos é \(M=3\).
> modelo.ppr11 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 3, max.terms = 5)
> R2(wage1$lwage, fitted.values(modelo.ppr11))
[1] 0.4752204
> modelo.ppr21 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 3, max.terms = 6)
> R2(wage1$lwage, fitted.values(modelo.ppr21))
[1] 0.4721492
> modelo.ppr31 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 3, max.terms = 7)
> R2(wage1$lwage, fitted.values(modelo.ppr31))
[1] 0.4764152
> modelo.ppr41 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 3, max.terms = 8)
> R2(wage1$lwage, fitted.values(modelo.ppr41))
[1] 0.4460973
> modelo.ppr51 = ppr(lwage ~ female+educ+exper, data = wage1, nterms = 3, max.terms = 9)
> R2(wage1$lwage, fitted.values(modelo.ppr51))
[1] 0.4861771
> summary(modelo.ppr51)
Call:
ppr(formula = lwage ~ female + educ + exper, data = wage1, nterms = 3,
max.terms = 9)
Goodness of fit:
3 terms 4 terms 5 terms 6 terms 7 terms 8 terms 9 terms
76.30390 74.10947 73.00246 71.62785 70.10163 70.17658 68.77666
Projection direction vectors ('alpha'):
term 1 term 2 term 3
femaleFemale -0.22908816 0.98099440 0.14632600
femaleMale 0.74008895 0.05253875 0.97618737
educ 0.63226754 0.08195210 -0.15525979
exper 0.00497110 0.16784969 -0.03925963
Coefficients of ridge terms ('beta'):
term 1 term 2 term 3
0.3850895 0.3699895 0.2478915
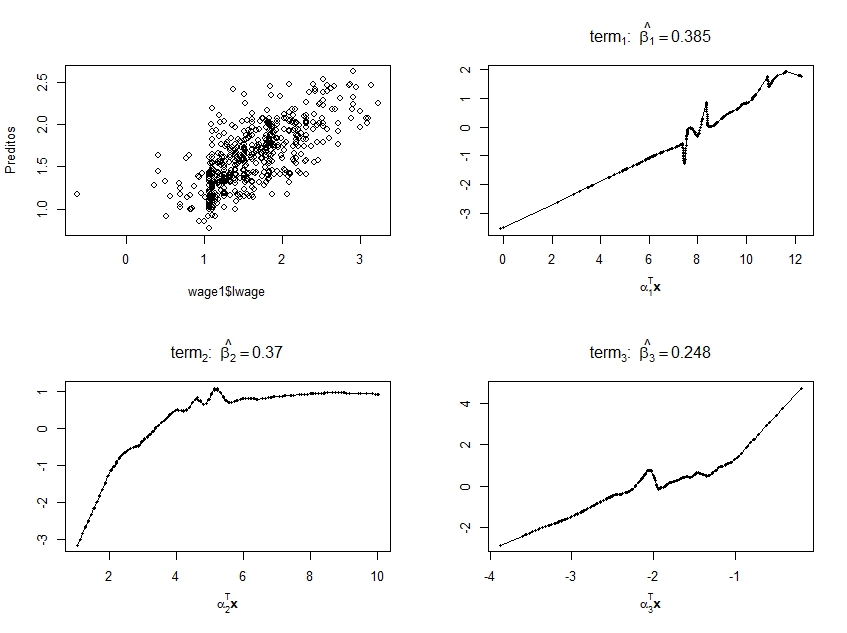 |
> Preditos = predict(modelo.ppr51)
> par(mfrow=c(2,2))
> plot(wage1$lwage, Preditos)
> plot(modelo.ppr51)
A ideia da prospeção de projeção não é nova. A interpretação de dados
de alta dimensão através do uso de projeções de dimensões inferiores bem escolhidas é um procedimento
padrão na análise de dados multivariados. A escolha de uma projeção é geralmente guiada por uma figura de
mérito apropriada. Se o objetivo é preservar as distâncias entre pontos tão bem quanto possível, a figura de
mérito apropriada é a variância dos dados projetados, levando à projeção no maior componente principal.
Se o propósito é separar duas amostras gaussianas com matrizes de covariância iguais, a figura de mérito é a taxa
de erro de uma regra de classificação unidimensional na projeção, levando à Análise Linear Discriminante.
Em ambos os casos, a figura de mérito é especialmente simples e a solução pode ser encontrada pela álgebra linear.
A regressão por prospeção de projeção segue uma receita semelhante. Ela constrói um modelo
da superfície de regressão com base em projeções dos dados nos planos abrangidos pela resposta \(Y\) e uma combinação
linear \(\alpha X\) das preditoras. Aqui, a figura de mérito para uma projeção é a fração de variância explicada
por um alisamento de \(Y\) versus \(\alpha X\). A estrutura é removida formando os resíduos do alisamento e substituindo-os pela resposta. O
modelo em cada iteração é a soma das suavizações que foram subtraídas anteriormente e, portanto, incorpora a estrutura
até agora encontrada.
Uma árvore de regressão é um modelo da forma
\begin{equation}
r(x) \, = \, \sum_{m=1}^M c_m I(x\in R_m),
\end{equation}
onde \(c_1,\cdots,c_M\) são constantes e \(R_1,\cdots,R_M\) são retângulos disjuntos que dividem o espaço das
covariáveis. Os modelos de árvores foram introduzidos por Morgan and Sonquist (1963) e Breiman et al. (1984). O modelo é
ajustado de uma maneira recursiva que pode ser representada como uma árvore; daí o nome. Nossa descrição segue
Hastie et al. (2001).
Denote um valor genérico das covariáveis por \(x = (x_1,\cdots, x_j, \cdots , x_d)\). A covariável para a \(i\)-ésima
observação é \(x_i = (x_{i1}, \cdots, x_{ij},\cdots ,x_{id})\). Dada a covariável \(j\) e um ponto de divisão
\(s\) definimos os retângulos
\begin{equation}
R_1 = R_1(j,s) = \{x: x_j\leq s\} \qquad e \qquad R_2 = R_2 (j, s) = \{x: x_j> s\}
\end{equation}
onde, nesta expressão, \(x_j\) se refere à \(j\)-ésima covariável não a observação \(j\).
Escolhemos então \(c_1\) como a média de todos o \(Y_i\) tais que \(x_i\in R_1\) e \(c_2\) como a média de todos os
\(Y_i\) de tal forma que \(x_i\in R_2\). Observe que \(c_1\) e \(c_2\) minimizam as somas de quadrados \(\sum_{x_i\in R_1}(Y_i-c_1)^2\) e
\(\sum_{x_i\in R_2}(Y_i-c_2)^2\). A escolha de qual covariável \(x_j\) dividir e qual o ponto de divisão \(s\) para usar é
baseado na minimização das somas de quadrados residuais. O processo de divisão é repetido em cada retângulo
\(R_1\) e \(R_2\).
A figura mostra um exemplo simples de uma árvore de regressão; também são mostrados os retângulos correspondentes.
A estimativa da função é constante sobre os retângulos.
Exemplo de uma árvore de regressão para duas covariáveis \(x_1\) e \(x_2\). A estimativa da função é
\begin{equation}
r(x) = c_1I(x\in R_1) + c_2I(x \in R_2) + c_3I(x \in R_3)
\end{equation}
onde \(R_1\), \(R_2\) e \(R_3\) são os retângulos mostrados ao lado.
Geralmente, uma árvore cresce muito e, em seguida, a árvore é podada para formar uma subárvore, colapsando as
regiões juntas. O tamanho da árvore é um parâmetro de ajuste escolhido da seguinte maneira. Seja \(N_m\) o número
de pontos em um retângulo \(R_m\) de uma subárvore \(T\) e defina
\begin{equation}
c_m \, = \, \frac{1}{N_m}\sum_{x_i\in R_m} Y_i \qquad e \qquad Q_m(T) \, = \, \frac{1}{N_m}\sum_{x_i\in R_m} (Y_i-c_m)^2\cdot
\end{equation}
Definamos a complexidade de \(T\) por
\begin{equation}
C_{\alpha}(T) \, = \, \sum_{m=1}^{|T|} N_m Q_m(T)+\alpha|T|,
\end{equation}
onde \(\alpha> 0\) e \(|T|\) é o número de nós terminais da árvore. Seja \(T_\alpha\) a menor subárvore
que minimize o \(C_\alpha\). O valor \(\widehat{\alpha}\) de \(\alpha\) pode ser escolhido por validação cruzada. A estimativa
final é baseada na árvore \(T_{\widehat{\alpha}}\).
Exemplo IV.17.
Este exemplo, de Venables and Ripley (2002), envolve três covariáveis e uma variável de resposta. Os dados são 48 amostras
de rochas de um reservatório de petróleo. A resposta é a
permeabilidade em milli-Darcies. As covariáveis são:
área
de poros, em pixels de 256 por 256,
perímetro em pixels e
forma, medida em perímetro/\(\sqrt{área}\). O objetivo
é prever a permeabilidade utilizando as três covariáveis. Um modelo não paramétrico é
\begin{equation}
permeabilidade \, = \, r(área, perímetro, forma) \, + \, \epsilon\cdot
\end{equation}
> rock.dat = read.table("rock.dat", header = TRUE)
> library(tree)
> rock.model1 = tree(perm ~ area + peri + shape, data = rock.dat)
> par(mfrow = c(1,1), xpd = NA) # caso contrário, em alguns dispositivos, o texto é recortado
> plot(rock.model1)
> text(rock.model1, cex=.75)
Podemos comparar as previsões com o conjunto de dados.
> R2(rock.dat$perm,predict(rock.model1))
[1] 0.790755
O qual indica um bom ajuste aos dados. Podemos comparar as previsões com o conjunto de dados sendo que, quanto mais escuro maior
permeabilidade. Na figura abaixo à esquerda. Observe os valores médios de permeabilidade segundo as diferentes classificações.
> mean(rock.dat$perm[rock.dat$area>4000 & rock.dat$peri<2500])
[1] 860
> mean(rock.dat$perm[rock.dat$area<4000 & rock.dat$peri<2500])
[1] 460
> mean(rock.dat$perm[rock.dat$peri>2500])
[1] 70.9
> rock.model1
node), split, n, deviance, yval
* denotes terminal node
1) root 48 9009000 415.4
2) peri < 2536.19 24 3252000 760.0
4) area < 3858.5 6 1123000 460.0 *
5) area > 3858.5 18 1409000 860.0
10) shape < 0.31914 13 659500 749.2
20) area < 6170 5 409700 622.0 *
21) area > 6170 8 118300 828.8 *
11) shape > 0.31914 5 175100 1148.0 *
3) peri > 2536.19 24 58880 70.9 *
> rock.model11 = snip.tree(rock.model1, nodes = 5)
> perm.deciles = quantile(rock.dat$perm, 0:10/10)
> cut.perm = cut(rock.dat$perm, perm.deciles, include.lowest=TRUE)
> plot(rock.dat$peri, rock.dat$area, col=grey(10:2/11)[cut.perm], pch=20, xlab="Perímetro",ylab="Área")
> partition.tree(rock.model11, ordvars = c("peri", "area"), add = TRUE)
Os gráficos são em duas dimensões, por isso, devemos escolher uma subárvore em
snip.tree que
contenha somente duas variáveis e com esse objetivo eliminamos, por exemplo, o nodo 5 obténdo-se o gráfico a direita acima.
> summary(rock.model1)
Regression tree:
tree(formula = perm ~ area + peri + shape, data = rock.dat)
Number of terminal nodes: 5
Residual mean deviance: 43840 = 1885000 / 43
Distribution of residuals:
Min. 1st Qu. Median Mean 3rd Qu. Max.
-522.0 -64.6 11.5 0.0 71.1 840.0
No resumo do modelo
Residual mean deviance significa o erro quadrático médio residual.
A flexibilidade de uma árvore de regressãão é basicamente controlada por quantas folhas elas têm, já que
são quantas células elas particionam. A função de ajuste da árvore tem um número de configurações
de controles que limitam o quanto crescerá, cada nó deve conter um certo número de pontos e adicionar um nó deve reduzir
o erro em pelo menos uma certa quantidade. O padrão para o último, min.dev, é 0:01; vamos desligá-lo e
ver o que acontece:
> rock.model2 = tree(perm ~ area + peri + shape, data = rock.dat, mindev = 0.001)
> plot(rock.model2)
> text(rock.model2, cex=.75)
> summary(rock.model2)
Regression tree:
tree(formula = perm ~ area + peri + shape, data = rock.dat, mindev = 0.001)
Number of terminal nodes: 6
Residual mean deviance: 44500 = 1869000 / 42
Distribution of residuals:
Min. 1st Qu. Median Mean 3rd Qu. Max.
-522.00 -32.34 -8.54 0.00 87.25 840.00
As árvores de classificação geram a classe prevista para uma determinada amostra. Vamos usar aqui o conjunto de dados
rock.dat dividido em dois: de treinamento e teste. O conjunto de treinamento será de aproximadamente 70% do conjunto original.
> set.seed(101)
> alpha = 0.7 # percentagem do conjunto de treino
> inTrain = sample(1:nrow(rock.dat), alpha * nrow(rock.dat))
> train.set = rock.dat[inTrain,]
> test.set = rock.dat[-inTrain,]
Existem duas opções para a saída: a previsão pontual, na qual simplesmente se fornece a predição da
classe e a previsão da distribuição, neste fornece-se uma probabilidade para cada classe. Nosso caso a resposta é contínua,
então temos somente a previsão pontual.
> # Ajuste do modelo para a base de treinamento
> rock.model3 = tree(perm ~ area + peri + shape, data = train.set)
> rock.model3
node), split, n, deviance, yval
* denotes terminal node
1) root 33 6073000 417.10
2) peri < 2703.07 15 1192000 836.70
4) shape < 0.212979 6 499300 676.70 *
5) shape > 0.212979 9 436400 943.30 *
3) peri > 2703.07 18 41790 67.54 *
> summary(rock.model3)
Regression tree:
tree(formula = perm ~ area + peri + shape, data = train.set)
Variables actually used in tree construction:
[1] "peri" "shape"
Number of terminal nodes: 3
Residual mean deviance: 32580 = 977500 / 30
Distribution of residuals:
Min. 1st Qu. Median Mean 3rd Qu. Max.
-576.700 -53.330 -8.944 0.000 63.330 356.700
> # Previsão pontual
> my.prediction = predict(rock.model3, test.set) # gives the probability for each class
> my.prediction
1 5 10 12 15 24 28 31 38
67.54444 67.54444 67.54444 67.54444 67.54444 67.54444 676.66667 943.33333 943.33333
39 40 41 44 47 48
676.66667 943.33333 943.33333 943.33333 676.66667 676.66667
Observe que a variável área não aparece na árvore. Isso significa que essa variável nunca foi a covariável
ideal para dividir o algoritmo nessa base de dados de treinamento. O resultado é que a árvore depende apenas área de porose do
perímetro. Isso ilustra uma característica importante da árvode de regressão: ela executa automaticamente
a seleção de variáveis no sentido de que uma covariada \(x_j\) não aparecerá na árvore se o algoritmo achar
que a variável não é importante.
> par(mar=c(4,4,1,1))
> plot(rock.dat$peri, rock.dat$shape, pch=19, col=as.numeric(rock.dat$perm),
xlab = "Perímetro", ylab = "Área")
> partition.tree(rock.model3, label="Perímetro", add=TRUE)
> legend("topright",legend=unique(rock.dat$perm), col = unique(as.numeric(rock.dat$perm)),
pch=19, cex = 0.6, horiz = FALSE, ncol = 3)
Podemos podar a árvore para evitar overfitting. A próxima função prune.tree() nos permite escolher quantas
folhas queremos que a árvore tenha e ela retorna a melhor árvore com esse tamanho. O argumento newdata aceita novas
entradas para tomar a decisão de podar. Se novos dados não forem fornecidos, o método usará o conjunto de dados original
a partir do qual o modelo de árvore foi criado. Para árvores de classificação, ou seja, de resposta multinomial também
podemos usar o método method = misclass, de modo que a medida de poda seja o número de erros de classificação.
> pruned.rock = prune.tree(rock.model3, best = 2)
> plot(pruned.rock)
> text(pruned.rock)
Este pacote também podemos utilizar validação cruzada para encontrar a melhor árvore, usando cv.tree(). Aqui,
vamos usar todas as variáveis e todas as amostras. Na figura acima mostramos dois gráficos, a árvore com somente duas folha (best = 2) e
o resultado da árvore obtida por validação cruzada.
> rock.model4 = tree(perm ~ ., data = rock.dat)
> summary(rock.model4)
Regression tree:
tree(formula = perm ~ ., data = rock.dat)
Number of terminal nodes: 5
Residual mean deviance: 43840 = 1885000 / 43
Distribution of residuals:
Min. 1st Qu. Median Mean 3rd Qu. Max.
-522.0 -64.6 11.5 0.0 71.1 840.0
> cv.model = cv.tree(rock.model4)
> plot(cv.model)
Mostramos o desvio para cada árove segundo o número de folha, quanto menor melhor.
> cv.model$dev
[1] 4745226 4930241 5121875 5123366 9939503
Como é muito difícil decidir assim, perguntamos então qual tamanho é melhor?
> best.size = cv.model$size[which(cv.model$dev == min(cv.model$dev))]
> best.size
[1] 5
e temos por resposta a árove com 5 folhas. Vamos refazer o modelo da árvore com o número
de folhas não sendo maior que o melhor tamanho.
> cv.model.pruned = prune.tree(rock.model4, best = best.size)
> summary(cv.model.pruned)
Regression tree:
tree(formula = perm ~ ., data = rock.dat)
Number of terminal nodes: 5
Residual mean deviance: 43840 = 1885000 / 43
Distribution of residuals:
Min. 1st Qu. Median Mean 3rd Qu. Max.
-522.0 -64.6 11.5 0.0 71.1 840.0
Podemos fazer mais bonito ainda. O desenvolvimento teórico permanece o mesmo porém o pacote rpart
é mais rápido do que o tree e a qualidade de plotagem e funções de texto são melhores
utilizando o pacote partykit.
Exemplo IV.18. (Continuação do Exemplo IV.17)
> library(rpart)
> rock.rpart = rpart(perm ~ ., data = train.set)
> plot(rock.rpart, uniform=TRUE, branch=0.6, margin=0.05)
> text(rock.rpart, all=TRUE, use.n=TRUE)
> title("Árvore no Conjunto de Treinamento")
> predictions = predict(rock.rpart, test.set)
> table(test.set$perm, predictions)
predictions
67.5444444444444 836.666666666667
6.3 1 0
17.1 1 0
82.4 1 0
100 0 3
119 2 0
142 1 0
580 0 2
740 0 1
890 0 1
1300 0 2
> prune.rpart = prune(rock.rpart, cp=0.02) # podando a árvore
> plot(prune.rpart, uniform=TRUE, branch=0.6)
> text(prune.rpart, all=TRUE, use.n=TRUE)
> summary(prune.rpart)
Call:
rpart(formula = perm ~ ., data = train.set)
n= 33
CP nsplit rel error xerror xstd
1 0.7968991 0 1.0000000 1.1467430 0.1734081
2 0.0100000 1 0.2031009 0.2349355 0.1118926
Variable importance
peri area shape
48 35 16
Node number 1: 33 observations, complexity param=0.7968991
mean=417.1455, MSE=184044.7
left son=2 (18 obs) right son=3 (15 obs)
Primary splits:
peri < 2703.065 to the right, improve=0.7968991, (0 missing)
area < 7936.5 to the right, improve=0.4677176, (0 missing)
shape < 0.2693715 to the left, improve=0.2583957, (0 missing)
Surrogate splits:
area < 6755.5 to the right, agree=0.879, adj=0.733, (0 split)
shape < 0.251364 to the left, agree=0.697, adj=0.333, (0 split)
Node number 2: 18 observations
mean=67.54444, MSE=2321.938
Node number 3: 15 observations
mean=836.6667, MSE=79448.89
Apresentamos o resultado do modelo quando podamos a árove mas não o gráfico porque é o mesmo modelo.
> # criando gráficos adicionais
> par(mfrow = c(1,2)) # dois gráficos em uma página
> rsq.rpart(rock.rpart1) # visualiza resultados de validação cruzada
Regression tree:
rpart(formula = perm ~ ., data = train.set, method = "anova")
Variables actually used in tree construction:
[1] peri
Root node error: 6073475/33 = 184045
n= 33
CP nsplit rel error xerror xstd
1 0.7969 0 1.0000 1.10050 0.17373
2 0.0100 1 0.2031 0.23452 0.11226
IV.9 Exercícios
- Obter os dados sobre fragmentos de vidro coletados em trabalhos forenses em glass.dat. Considere que \(RI\) seja o
índice de refracção e que \(Al\) seja o teor de alumínio. Realize uma regressão não paramétrica
para ajustar o modelo \(RI = r(Al) + \epsilon\). Utilize os seguintes estimadores:
- i) regressograma,
- ii) kernel,
- iii) regressão linear local,
- iv) spline.
Em cada caso, utilizar validação cruzada para escolher o parâmetro de alisamento. Estime a variância. Construir
bandas de confiança de 95% para as suas estimativas.
A leitura dos dados pode ser feita utilizando o comando R:
dados = read.table(”http://www.stat.cmu.edu/∼larry/all-of-nonpar/=data/glass.dat”, header = TRUE)
- O número de laranjas podres \(y\) em 10 caixas selecionadas aleatoriamente de uma grande remessa é contada depois de
terem sido armazenadas por um número determinado de dias \(x\). Use o método Theil-Kendall para calcular a inclinação
de uma linha reta ajustada a esses dados e obtenha uma estimativa apropriada do intercepto.
| x | | 3 | | 5 | | 8 | | 11 | | 15 |
| 18 | | 20 | | 25 | | 27 | | 30 |
|
| y | | 2 | | 4 | | 7 | | 10 | | 17 |
| 23 | | 29 | | 45 | | 59 | | 73 |
Plote estes dados e encontre o modelo ajustado. O ajuste parece razoável?
- Os seguintes dados têm como base no censo de agricultura dos EUA, que fornece, em intervalos de aproximadamente 10 anos,
de 1920 a 1980, as porcentagens de fazendas dos EUA com tratores e fazendas com cavalos. Explique por que seria inútil ou
errado ajustar uma regressão linear para porcentagem de tratores versus porcentagem de cavalos utilizando esses dados. Sugira
que tipo alternativo de regressão pode ser mais apropriado.
| Percentagem de tratores | | 9.2 | | 30.9 | | 58.8 | | 72.7 |
| 89.9 | | 88.7 | | 90.2 |
|
| Percentagem de cavalos | | 91.8 | | 88.0 | | 80.6 | | 43.6 |
| 16.7 | | 14.4 | | 10.5 |
- Dados simulados de acidentes de motocicleta: os dados em motor.dat possuem 94 linhas e 4 colunas. A covariável é
o tempo, chamado de times, medido em milissegundos e a resposta é a aceleração accel no
momento do impacto. Use validação cruzada para ajustar uma curva suave usando a regressão linear local.
- Em 1976 dois pesquisadores mediram a concentração de amônia \(y\) em \(mg/l\) em várias profundidades
\(x\), em metros, no Mar Morto. Ajustar uma regressão linear para a concentração segundo as profundidades usando
o método de Kendall-Theil e obter um intervalo de confiança aproximado de 95 por cento para \(\beta\).
| x | | 25 | | 50 | | 100 | | 150 | | 155 | | 187 |
| 200 | | 237 | | 287 | | 290 | | 300 |
|
| y | | 6.13 | | 5.51 | | 6.18 | | 6.70 | | 7.22 |
| 7.28 | | 7.22 | | 7.48 | | 7.38 | | 7.38 | | 7.64 |
- Numa pesquisa em 1965 fornece-nos dados para peso do alimento ingerido \(x\) e ganho de peso \(y\) para 10 suínos alimentados
com um tipo de alimento \(A\) e para 10 alimentados com um segundo tipo \(B\). Use o método adequado para ajustar as regressões
lineares a cada uma das situações e testar se a hipótese de que as inclinações são iguais
é suportada.
| A | | x | | 575 | | 585 | | 628 | | 632 |
| 637 | | 638 | | 661 | | 674 | | 694 | | 713 |
| | | y | | 130 | | 146 | | 156 | | 164 |
| 158 | | 151 | | 159 | | 165 | | 167 | | 170 |
|
| B | | x | | 625 | | 646 | | 651 | | 678 |
| 710 | | 722 | | 728 | | 754 | | 763 | | 831 |
| | | y | | 147 | | 164 | | 149 | | 160 |
| 184 | | 173 | | 193 | | 189 | | 200 | | 201 |
- Sejam \(Y_i \sim N(\mu_i,1)\) para \(i=1,2,\cdots,n\) observações independentes. Encontre os estimadores que minimizam
cada uma das seguintes somas de quadrados penalizadas:
- (a) \(\displaystyle \sum_{i=1}^n (Y_i-\widehat{\mu}_i)^2 \, + \, \lambda\sum_{i=1}^n \widehat{\mu}_i^2\).
- (b) \(\displaystyle \sum_{i=1}^n (Y_i-\widehat{\mu}_i)^2 \, + \, \lambda\sum_{i=1}^n |\widehat{\mu}_i|\).
- (c) \(\displaystyle \sum_{i=1}^n (Y_i-\widehat{\mu}_i)^2 \, + \, \lambda\sum_{i=1}^n I\big(\widehat{\mu}_i=0\big)\).
- Seja \(\widehat{r}_n(x_1,x_2)=\sum_{i=1}^n Y_il_i(x_1,x_2)\) um estimador linear da função de regressão múltipla \(r(x_1,x_2)\).
Suponha que queremos testar a hipótese de que a covariável \(x_2\) pode ser descartada da regressão. Uma possibilidade é
formar um estimador linear da forma \(\widetilde{r}_n(x_1)=\sum_{i=1}^n Y_i\widetilde{l}_i(x_1)\) e em seguida, calcular
\begin{equation}
T \, = \, \sum_{i=1}^n \Big(\widehat{r}_n(x_{1i},x_{2i})-\widetilde{r}_n(x_{1i}) \Big)^2\cdot
\end{equation}
- (a) Suponha que o verdadeiro modelo seja \(Y_i=r(x_{1i})+\epsilon_i\), onde \(\epsilon_i\sim N(0,\sigma^2)\).
Por simplicidade assuma \(\sigma\) conhecido. Encontre uma expressão para a distribuição de \(T\).
- (b) A distribuição nula na parte (a) depende da função desconhecida \(r(x_{1i})\). Como você pode
estimar a distribuição nula?
- (c) Crie dados simulados do modelo em (a), use qualquer função \(r(x_1)\) desejada, e veja se o método
proposto em (b) aproxima a distribuição nula.